Building a Position Estimator for a Robot | Mission on Mars Robot Challenge
From the series: Mission on Mars Robot Challenge
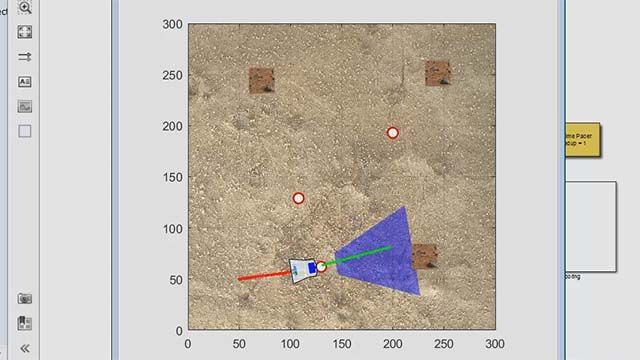
Overview of a simple position estimator for a wheeled robot, i.e. an algorithm assessing the absolute robot position based on relative wheel angle information.
Published: 24 Mar 2016
Featured Product