Cette page a été traduite automatiquement.
Merci de bien vouloir compléter un sondage de 1 minute concernant la qualité de cette traduction.
Développement d'un texte structuré conforme à la norme ISO 26262 et à la norme SOTIF, pour les véhicules autonomes à faible vitesse
Soutenu par IFM Electronic, le projet aide à développer des compétences industrielles pertinentes pour les étudiants
« Nous avons choisi MATLAB et Simulink pour implémenter nos algorithmes de couche de sécurité, car ils sont proposés avec un toolkit de certification ISO 26262 et permettent des vérifications statiques à la fois sur le modèle et sur le code généré. »
Principaux résultats
- Des algorithmes de contrôle prototypés rapidement pour les véhicules autonomes, permettant des tests dans des environnements 3D basés sur des scénarios.
- Texte structuré conforme aux normes ISO 26262 et SOTIF, généré à l'aide de MATLAB et Simulink.
- Développement de supports pédagogiques pour le design de systèmes de contrôle embarqués à partir des résultats du projet, reflétant les derniers sujets d'intérêt industriels.
- Les outils MATLAB et Simulink ont permis la création d'un concept de sécurité open source et réutilisable, soutenu par des processus et une documentation conformes aux normes de l’industrie.
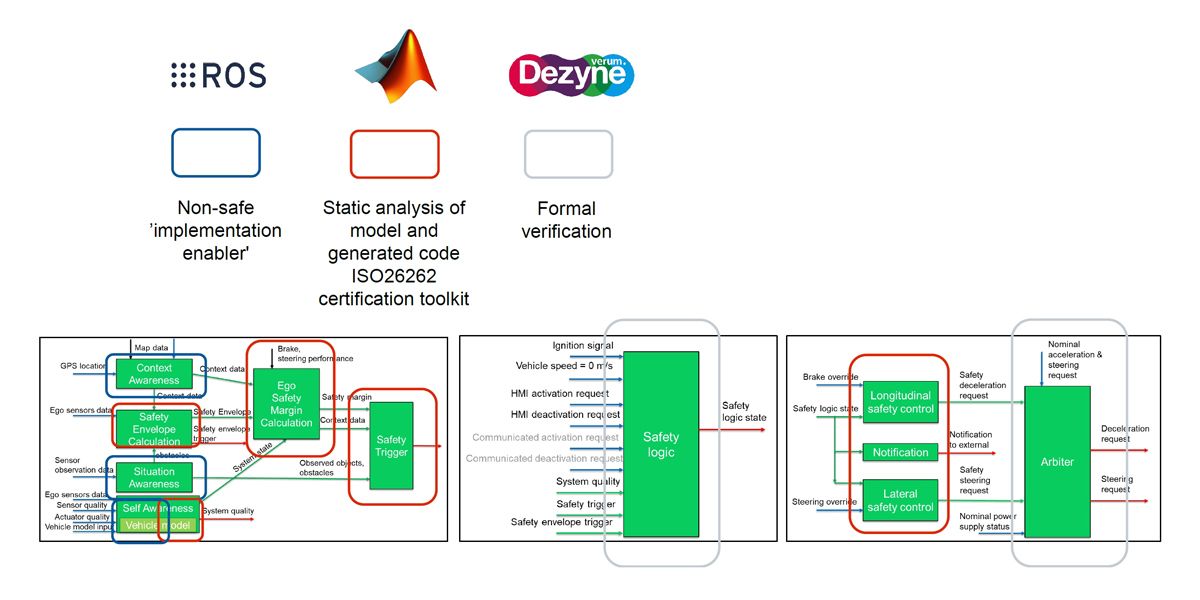
Workflow pour la couche de sécurité AV utilisant l'analyse de modèle/de code statique et la vérification formelle.
La Hogeschool van Arnhem en Nijmegen (HAN) est une université néerlandaise de sciences appliquées qui fonde ses programmes sur des recherches menées avec des partenaires industriels. En tant que partenaire principal du projet Safety Concept for Low-speed AV Implementations (SafeCLAI) aux Pays-Bas, HAN, avec le soutien d'IFM Electronic, a conçu une couche de sécurité réutilisable, conforme aux normes ISO® 26262 et SOTIF, pour les véhicules autonomes basés sur ROS.
En choisissant MATLAB® et Simulink® pour mettre en œuvre la couche de sécurité, HAN a eu accès au kit de certification IEC, permettant ainsi des workflows de vérification et de validation conformes aux normes, pour générer du code certifiable et intégrable. ROS Toolbox a aidé l'équipe HAN à surmonter le défi du transfert de données à partir de capteurs simulés dans l'environnement 3D, grâce à l'utilisation de messages ROS spécialisés. IFM Electronic a contribué au projet en apportant son expertise en matière de sécurité fonctionnelle et en fournissant un contrôleur de sécurité exécutant le texte structuré généré dans une architecture de contrôleur sûre.
HAN dispose désormais d’un environnement de vérification et de validation réutilisable et basé sur des scénarios, dans lequel tester en toute sécurité les systèmes de véhicules autonomes. Ce workflow devrait continuer à se développer et sera de mieux en mieux intégré à l’avenir. Par exemple, étant donné que ROS ne dispose pas de workflow pouvant être certifiés, HAN envisage d’utiliser RoadRunner pour les scénarios de conduite simulés et de déplacer les workflows pour le traitement des images et des signaux vers MATLAB et Simulink. Pour les projets futurs, le passage au code C généré et l’adoption de Polyspace® sont également envisagés pour vérifier et prouver la conformité MISRA™ du code intégré et pour améliorer la cohérence de la chaîne d'outils.
Le code source du projet et les documents associés ont été publiés sur GitLab® à des fins industrielles et pédagogiques. De plus, le programme d'études de HAN sera enrichi avec des supports de cours sur la sécurité fonctionnelle issus du projet SafeCLAI. Cela aidera les étudiants à développer de précieuses compétences en matière d'employabilité en les exposant à la manière dont les outils de génération de code, ainsi que MATLAB et Simulink, sont utilisés dans l'industrie.