ldpcDecode
Syntax
Description
[
decodes the input log-likelihood ratio (LLR), Y,actualnumiter,finalparitychecks] = ldpcDecode(llr,decodercfg,maxnumiter)llr, using the
LDPC matrix specified by the input ldpcDecoderConfig
configuration object, decodercfg. A
positive LLR indicates that the corresponding bit is more likely a zero. Decoding terminates
when all of the parity checks are satisfied, up to a maximum number of iterations specified
by the input maxnumiter. LDPC
codes are linear error control codes with sparse parity-check matrices and long block
lengths that can attain performance near the Shannon limit.
[
specifies additional name-value arguments. For example,
Y,actualnumiter,finalparitychecks] = ldpcDecode(llr,decodercfg,maxnumiter,Name=Value)DecisionType='soft' specifies soft-decision decoding and outputs
LLRs.
Examples
Initialize parameters for the prototype matrix and block size to configure a rate 3/4 LDPC code specified in IEEE® 802.11. Create the parity-check matrix by using the ldpcQuasiCyclicMatrix function.
P = [
16 17 22 24 9 3 14 -1 4 2 7 -1 26 -1 2 -1 21 -1 1 0 -1 -1 -1 -1
25 12 12 3 3 26 6 21 -1 15 22 -1 15 -1 4 -1 -1 16 -1 0 0 -1 -1 -1
25 18 26 16 22 23 9 -1 0 -1 4 -1 4 -1 8 23 11 -1 -1 -1 0 0 -1 -1
9 7 0 1 17 -1 -1 7 3 -1 3 23 -1 16 -1 -1 21 -1 0 -1 -1 0 0 -1
24 5 26 7 1 -1 -1 15 24 15 -1 8 -1 13 -1 13 -1 11 -1 -1 -1 -1 0 0
2 2 19 14 24 1 15 19 -1 21 -1 2 -1 24 -1 3 -1 2 1 -1 -1 -1 -1 0
];
blockSize = 27;
pcmatrix = ldpcQuasiCyclicMatrix(blockSize,P);Create LDPC encoder and decoder configuration objects, displaying their properties.
cfgLDPCEnc = ldpcEncoderConfig(pcmatrix)
cfgLDPCEnc =
ldpcEncoderConfig with properties:
ParityCheckMatrix: [162×648 logical]
Read-only properties:
BlockLength: 648
NumInformationBits: 486
NumParityCheckBits: 162
CodeRate: 0.7500
cfgLDPCDec = ldpcDecoderConfig(pcmatrix)
cfgLDPCDec =
ldpcDecoderConfig with properties:
ParityCheckMatrix: [162×648 logical]
Algorithm: 'bp'
Read-only properties:
BlockLength: 648
NumInformationBits: 486
NumParityCheckBits: 162
CodeRate: 0.7500
Transmit an LDPC-encoded, M-QAM-modulated bit stream through an AWGN channel. Demodulate the signal, decode the received codewords, and then count bit errors. Use a for loop to process multiple SNR settings with and without LDPC forward error correction (FEC) coding of the transmitted data.
M = 64; maxnumiter = 10; snr = [0.5 1 1.5 2]; numframes = 20000; for ii = 1:length(snr) data = randi([0 1],cfgLDPCEnc.NumInformationBits,numframes,'int8'); % Transmit and receive with LDPC coding encodedData = ldpcEncode(data,cfgLDPCEnc); modSignal = qammod(encodedData,M,InputType='bit'); [rxsig, noisevar] = awgn(modSignal,snr(ii)); llrOut = qamdemod(rxsig,M, ... OutputType='approxllr', ... % Or use 'llr' for exact but slower LLR calculation NoiseVariance=noisevar); rxbits = ldpcDecode(llrOut,cfgLDPCDec,maxnumiter); fprintf(['SNR = %2.1f\n Coded: Error rate = %1.6f, ' ... 'Number of errors = %d\n'], ... snr(ii),nnz(data~=rxbits)/numel(data),nnz(data~=rxbits)); % Transmit and receive with no LDPC coding noCoding = qammod(data,M,InputType='bit'); rxNoCoding = awgn(noCoding,snr(ii)); rxBitsNoCoding = qamdemod(rxNoCoding,M,OutputType='bit'); fprintf(['Noncoded: Error rate = %1.6f, ' ... 'Number of errors = %d\n\n'], ... nnz(data~=rxBitsNoCoding)/numel(data),nnz(data~=rxBitsNoCoding)) end
SNR = 0.5 Coded: Error rate = 0.000441, Number of errors = 4282
Noncoded: Error rate = 0.039045, Number of errors = 379515
SNR = 1.0 Coded: Error rate = 0.000062, Number of errors = 604
Noncoded: Error rate = 0.032813, Number of errors = 318941
SNR = 1.5 Coded: Error rate = 0.000003, Number of errors = 27
Noncoded: Error rate = 0.027001, Number of errors = 262450
SNR = 2.0 Coded: Error rate = 0.000000, Number of errors = 0
Noncoded: Error rate = 0.021778, Number of errors = 211686
Initialize parameters for the prototype matrix and block size to configure a rate 3/4 LDPC code specified in IEEE® 802.11. Create the parity-check matrix by using the ldpcQuasiCyclicMatrix function.
P = [
16 17 22 24 9 3 14 -1 4 2 7 -1 26 -1 2 -1 21 -1 1 0 -1 -1 -1 -1
25 12 12 3 3 26 6 21 -1 15 22 -1 15 -1 4 -1 -1 16 -1 0 0 -1 -1 -1
25 18 26 16 22 23 9 -1 0 -1 4 -1 4 -1 8 23 11 -1 -1 -1 0 0 -1 -1
9 7 0 1 17 -1 -1 7 3 -1 3 23 -1 16 -1 -1 21 -1 0 -1 -1 0 0 -1
24 5 26 7 1 -1 -1 15 24 15 -1 8 -1 13 -1 13 -1 11 -1 -1 -1 -1 0 0
2 2 19 14 24 1 15 19 -1 21 -1 2 -1 24 -1 3 -1 2 1 -1 -1 -1 -1 0
];
blockSize = 27;
pcmatrix = ldpcQuasiCyclicMatrix(blockSize,P);Create LDPC encoder and decoder configuration objects, displaying their properties.
cfgLDPCEnc = ldpcEncoderConfig(pcmatrix)
cfgLDPCEnc =
ldpcEncoderConfig with properties:
ParityCheckMatrix: [162×648 logical]
Read-only properties:
BlockLength: 648
NumInformationBits: 486
NumParityCheckBits: 162
CodeRate: 0.7500
cfgLDPCDec = ldpcDecoderConfig(pcmatrix)
cfgLDPCDec =
ldpcDecoderConfig with properties:
ParityCheckMatrix: [162×648 logical]
Algorithm: 'bp'
Read-only properties:
BlockLength: 648
NumInformationBits: 486
NumParityCheckBits: 162
CodeRate: 0.7500
Transmit an LDPC-encoded, QPSK-modulated bit stream through an AWGN channel. Demodulate the signal, decode the received codewords, and then count bit errors. Use nested for loops to process multiple SNR settings and frames with and without LDPC forward error correction (FEC) coding of the transmitted data.
M = 4; maxnumiter = 10; snr = [3 6 20]; numframes = 10; ber = comm.ErrorRate; ber2 = comm.ErrorRate; for ii = 1:length(snr) for counter = 1:numframes data = randi([0 1],cfgLDPCEnc.NumInformationBits,1,'int8'); % Transmit and receive with LDPC coding encodedData = ldpcEncode(data,cfgLDPCEnc); modSignal = pskmod(encodedData,M,InputType='bit'); [rxsig, noisevar] = awgn(modSignal,snr(ii)); demodSignal = pskdemod(rxsig,M, ... OutputType='approxllr', ... NoiseVariance=noisevar); rxbits = ldpcDecode(demodSignal,cfgLDPCDec,maxnumiter); errStats = ber(data,rxbits); % Transmit and receive with no LDPC coding noCoding = pskmod(data,M,InputType='bit'); rxNoCoding = awgn(noCoding,snr(ii)); rxBitsNoCoding = pskdemod(rxNoCoding,M,OutputType='bit'); errStatsNoCoding = ber2(data,int8(rxBitsNoCoding)); end fprintf(['SNR = %2d\n Coded: Error rate = %1.2f, ' ... 'Number of errors = %d\n'], ... snr(ii),errStats(1),errStats(2)) fprintf(['Noncoded: Error rate = %1.2f, ' ... 'Number of errors = %d\n'], ... errStatsNoCoding(1),errStatsNoCoding(2)) reset(ber); reset(ber2); end
SNR = 3 Coded: Error rate = 0.07, Number of errors = 355
Noncoded: Error rate = 0.08, Number of errors = 384
SNR = 6 Coded: Error rate = 0.00, Number of errors = 0
Noncoded: Error rate = 0.02, Number of errors = 98
SNR = 20 Coded: Error rate = 0.00, Number of errors = 0
Noncoded: Error rate = 0.00, Number of errors = 0
Use a GPU to accelerate LDPC encoding, PSK modulation, AWGN channel modeling, PSK demodulation, LDPC decoding, and bit error rate computation. In this example you compute the error statistics for the belief propagation decoding algorithm and the normalized min-sum decoding algorithm.
Create LDPC Configuration Objects
Create an LDPC encoder configuration object and an LDPC decoder configuration object. Define simulation variables.
% Use ldpcQuasiCyclicMatrix to create a parity-check matrix load("LDPCExamplePrototypeMatrix.mat","P"); % A prototype matrix from the 5G standard blockSize = 384; H = ldpcQuasiCyclicMatrix(blockSize, P); encoderCfg = ldpcEncoderConfig(H); decoderCfg1 = ldpcDecoderConfig(encoderCfg); % The default algorithm is "bp" decoderCfg2 = ldpcDecoderConfig(encoderCfg,"norm-min-sum"); M = 4; % Modulation order (QPSK) snr = [-2 -1.5 -1]; numFramesPerCall = 50; numCalls = 40; maxNumIter = 20; s = rng(1235); % Fix random seed errRate = zeros(length(snr),2);
Compute Bit Error Rates
Generate random bits in a gpuArray (Parallel Computing Toolbox) object and let its data flow through the ldpcEncode, pskmod, awgn, pskdemod, ldpcDecode, and biterr functions. For each SNR setting, compute the error statistics for the belief propagation decoding algorithm and the normalized min-sum decoding algorithm.
for ii = 1:length(snr) ttlErr = [0 0]; noiseVariance = 1/10^(snr(ii)/10); for counter = 1:numCalls data = gpuArray.randi([0 1],encoderCfg.NumInformationBits,numFramesPerCall,'logical'); % Transmit and receive LDPC coded signal data encData = ldpcEncode(data,encoderCfg); modSig = pskmod(encData,M,pi/4,'InputType','bit'); rxSig = awgn(modSig,snr(ii)); % Signal power = 0 dBW demodSig = pskdemod(rxSig,M,pi/4,... 'OutputType','approxllr','NoiseVariance',noiseVariance); % Decode and update number of bit errors % Using bp rxBits1 = ldpcDecode(demodSig,decoderCfg1,maxNumIter); numErr1 = biterr(data,rxBits1); % Using norm-min-sum rxBits2 = ldpcDecode(demodSig,decoderCfg2,maxNumIter); numErr2 = biterr(data,rxBits2); ttlErr = ttlErr + [numErr1 numErr2]; end ttlBits = numCalls*numel(rxBits1); errRate(ii,:) = ttlErr/ttlBits; end
Compare Bit Error Rates
Plot the error statistics. The belief propagation algorithm is expected to achieve a slightly lower bit error rate than the normalized min-sum algorithm.
plot(snr,errRate,'-x') grid on legend('bp','norm-min-sum') xlabel('SNR (dB)') ylabel('BER')

Compare Speeds
Compare the execution speeds of four cases. By default, ldpcDecode terminates decoding when all parity checks are satisfied.
% Use belief propagation algorithm on CPU, without multithreading demodSigCPU = gather(demodSig); tic [rxBitsCPU1,actualNumIterCPU1,finalParityChecksCPU1] = ... ldpcDecode(demodSigCPU,decoderCfg1,maxNumIter,'Multithreaded',false); toc
Elapsed time is 4.270400 seconds.
% Use belief propagation algorithm on CPU, with multithreading tic [rxBitsCPU2,actualNumIterCPU2,finalParityChecksCPU2] = ... ldpcDecode(demodSigCPU,decoderCfg1,maxNumIter); toc
Elapsed time is 1.069500 seconds.
% Use belief propagation algorithm on GPU tic [rxBits1,actualNumIter1,finalParityChecks1] = ... ldpcDecode(demodSig,decoderCfg1,maxNumIter); toc
Elapsed time is 2.117112 seconds.
% Use normalized min-sum algorithm on GPU tic [rxBits2,actualNumIter2,finalParityChecks2] = ... ldpcDecode(demodSig,decoderCfg2,maxNumIter); toc
Elapsed time is 0.615488 seconds.
Examine Optional Decoder Outputs
Confirm that the normalized min-sum algorithm needs fewer iterations than the belief propagation algorithm when the SNR is sufficiently high.
length(find(actualNumIter2 < actualNumIter1))
ans = 50
length(find(actualNumIter2 == actualNumIter1))
ans = 0
Confirm that the final parity checks are all zeros when the actual number of iterations executed is less than the maximum number of iterations specified.
nnz(finalParityChecks1(:,actualNumIter1<maxNumIter))
ans = 0
nnz(finalParityChecks2(:,actualNumIter2<maxNumIter))
ans = 0
Restore the state for random number generation.
rng(s);
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
LDPC decoding using one of these message-passing algorithms.
The implementation of the belief propagation algorithm is based on the decoding algorithm presented by Gallager [2].
For transmitted LDPC-encoded codeword c = c0, c1, …, cn-1, the input to the LDPC decoder is the log-likelihood ratio (LLR) value .
In each iteration, the key components of the algorithm are updated based on these equations:
,
, initialized as before the first iteration, and
.
At the end of each iteration, L(Qi) contains the updated estimate of the LLR value for transmitted bit ci. The value L(Qi) is the soft-decision output for ci. If L(Qi) ≤ 0, the hard-decision output for ci is 1. Otherwise, the hard-decision output for ci is 0.
If decoding is configured to stop when all of the parity checks are satisfied, the algorithm verifies the parity-check equation (H c' = 0) at the end of each iteration. When all of the parity checks are satisfied, or if the maximum number of iterations is reached, decoding stops.
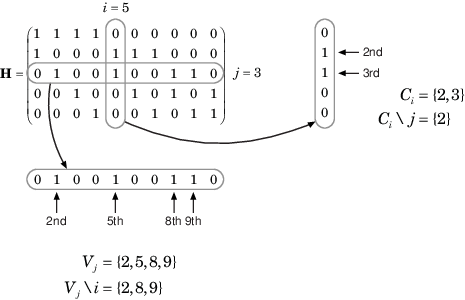
Index sets and are based on the parity-check matrix (PCM). Index sets Ci and Vj correspond to all nonzero elements in column i and row j of the PCM, respectively.
This figure shows the computation of these index sets in a given PCM for i = 5 and j = 3.
To avoid infinite numbers in the algorithm equations, atanh(1) and atanh(–1) are set to 19.07 and –19.07, respectively. Due to finite precision, MATLAB returns 1 for tanh(19.07) and –1 for tanh(-19.07).
References
[1] IEEE® Std 802.11™-2020 (Revision of IEEE Std 802.11-2016). "Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications." IEEE Standard for Information technology — Telecommunications and information exchange between systems. Local and metropolitan area networks — Specific requirements.
[2] Gallager, Robert G. Low-Density Parity-Check Codes. Cambridge, MA: MIT Press, 1963.
[3] Hocevar, D.E. "A reduced complexity decoder architecture via layered decoding of LDPC codes." In IEEE Workshop on Signal Processing Systems, 2004. SIPS 2004, 107-112. https://doi.org/10.1109/SIPS.2004.1363033.
[4] Chen, Jinghu, R.M. Tanner, C. Jones, and Yan Li. "Improved min-sum decoding algorithms for irregular LDPC codes." In Proceedings. International Symposium on Information Theory, 2005. ISIT 2005. https://doi.org/10.1109/ISIT.2005.1523374.