Emplacements des pôles et des zéros
Cet exemple indique comment examiner les emplacements des pôles et des zéros des systèmes dynamiques, graphiquement en utilisant pzplot et numériquement avec pole et zero.
Il peut être utile d’examiner les emplacements des pôles et des zéros pour certaines tâches telles que l'analyse de la stabilité ou l'identification de paires pôles-zéros proches de l'annulation dans un but de simplification du modèle. Cet exemple compare deux systèmes en boucle fermée présentant le même système physique mais des contrôleurs différents.
Créez des modèles de systèmes dynamiques représentant les deux systèmes en boucle fermée.
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
Le contrôleur C2 présente un gain proportionnel beaucoup plus élevé. Sinon, les deux systèmes en boucle fermée CL1 et CL2 sont identiques.
Examinez au niveau graphique les emplacements des pôles et des zéros de CL1 et de CL2.
pzplot(CL1,CL2) grid
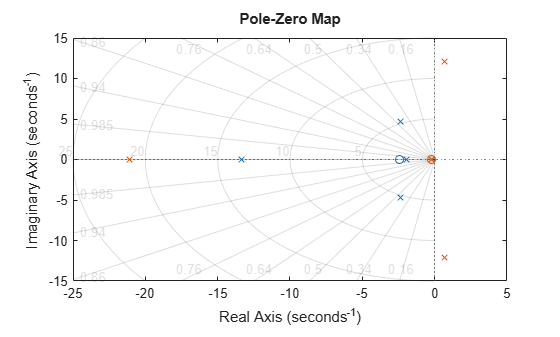
pzplot trace les emplacements des pôles et des zéros sur le plan complexe en tant que repères x et o respectivement. Lorsque vous fournissez de multiples modèles, pzplot trace les pôles et zéros de chaque modèle dans une couleur différente. Dans cet exemple, les pôles et zéros de CL1 sont bleus tandis que ceux de CL2 sont verts.
Le tracé permet de constater que tous les pôles de CL1 se trouvent dans le demi-plan de gauche. Par conséquent, CL1 est stable. Les marquages de la grille radiale du tracé vous permettent de constater que l’amortissement des pôles d’oscillation (complexes) est d’environ 0,45. Le tracé indique également que CL2 contient des pôles dans le demi-plan droit, ce qui le rend instable.
Calculez les valeurs numériques des emplacements des pôles et des zéros de CL2.
z = zero(CL2); p = pole(CL2);
zero et pole renvoient des vecteurs colonne contenant les emplacements des zéros et des pôles du système.