driving.Path
Planned vehicle path
Description
The driving.Path object represents a vehicle path composed of
a sequence of path segments. These segments can be either driving.DubinsPathSegment objects or driving.ReedsSheppPathSegment objects and are stored in the PathSegments property of driving.Path.
To check the validity of the path against a vehicleCostmap object, use the checkPathValidity function. To interpolate poses along the length of the
path, use the interpolate function.
Creation
To create a driving.Path object, use the plan
function, specifying a pathPlannerRRT object as input.
Properties
Object Functions
interpolate | Interpolate poses along planned vehicle path |
plot | Plot planned vehicle path |
Examples
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)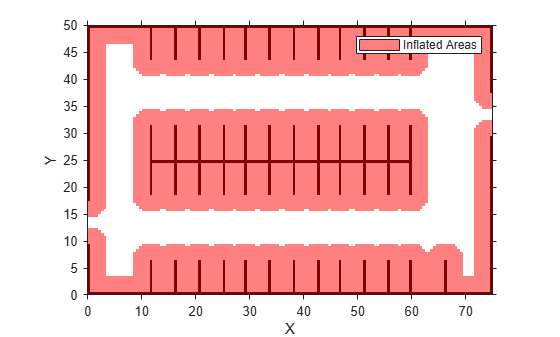
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
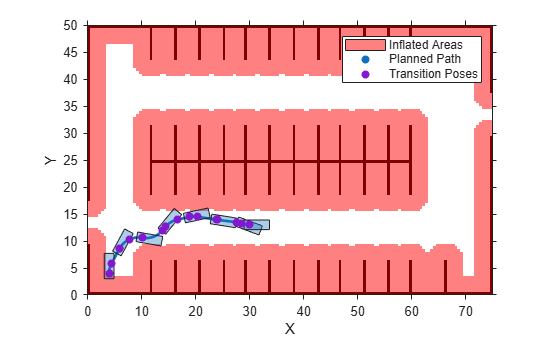
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Plan a vehicle path through a parking lot by using the rapidly exploring random tree (RRT*) algorithm. Interpolate the poses of the vehicle at points along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)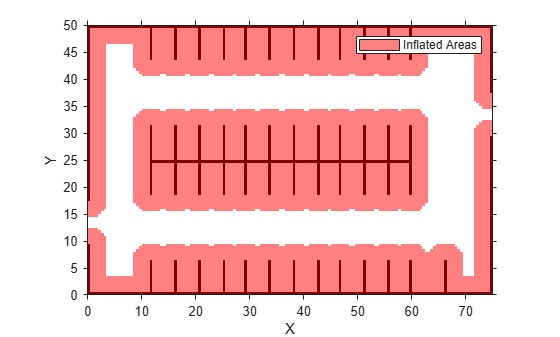
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0]; Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
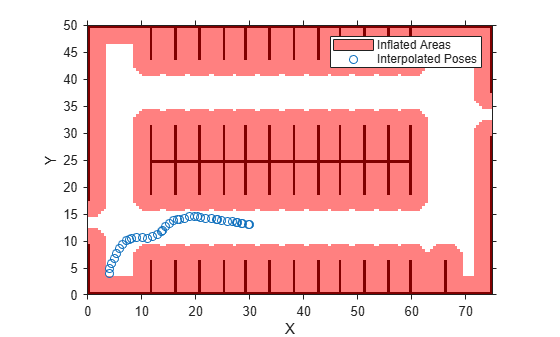
Interpolate the vehicle poses every 1 meter along the entire path.
lengths = 0 : 1 : refPath.Length; poses = interpolate(refPath,lengths);
Plot the interpolated poses on the costmap.
plot(costmap) hold on scatter(poses(:,1),poses(:,2),'DisplayName','Interpolated Poses') hold off