vehicleToImage
Convert vehicle coordinates to image coordinates
Description
imagePoints = vehicleToImage(monoCam,vehiclePoints)monoCam, contains the camera
parameters.
Examples
Create a forward-facing monocular camera sensor mounted on an ego vehicle. Examine an image captured from the camera and determine locations within the image in both vehicle and image coordinates.
Set the intrinsic parameters of the camera. Specify the focal length, the principal point of the image plane, and the output image size. Units are in pixels. Save the intrinsics as a cameraIntrinsics object.
focalLength = [800 800]; principalPoint = [320 240]; imageSize = [480 640]; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Specify the position of the camera. Position the camera 2.18 meters above the ground with a 14-degree pitch toward the ground.
height = 2.18; pitch = 14;
Define a monocular camera sensor using the intrinsic camera parameters and the position of the camera. Load an image from the camera.
sensor = monoCamera(intrinsics,height,'Pitch',pitch); Ioriginal = imread('road.png'); figure imshow(Ioriginal) title('Original Image')

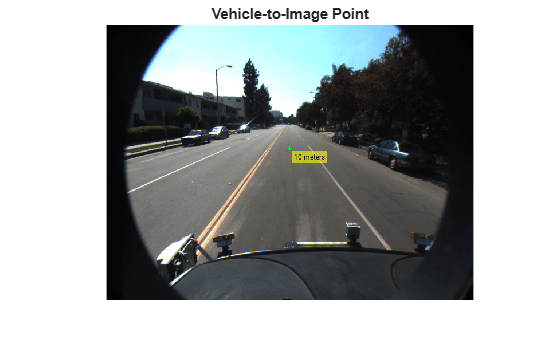
Determine the image coordinates of a point 10 meters directly in front of the camera. The X-axis points forward from the camera and the Y-axis points to the left.
xyVehicleLoc1 = [10 0]; xyImageLoc1 = vehicleToImage(sensor,xyVehicleLoc1)
xyImageLoc1 = 1×2
320.0000 216.2296
Display the point on the image.
IvehicleToImage = insertMarker(Ioriginal,xyImageLoc1); IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,'10 meters'); figure imshow(IvehicleToImage) title('Vehicle-to-Image Point')
Determine the vehicle coordinates of a point that lies on the road surface in the image.
xyImageLoc2 = [300 300]; xyVehicleLoc2 = imageToVehicle(sensor,xyImageLoc2)
xyVehicleLoc2 = 1×2
6.5959 0.1732
The point is about 6.6 meters in front of the vehicle and about 0.17 meters to the left of the vehicle center.
Display the vehicle coordinates of the point on the image.
IimageToVehicle = insertMarker(Ioriginal,xyImageLoc2); displayText = sprintf('(%.2f m, %.2f m)',xyVehicleLoc2); IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText); figure imshow(IimageToVehicle) title('Image-to-Vehicle Point')

Input Arguments
Output Arguments
More About
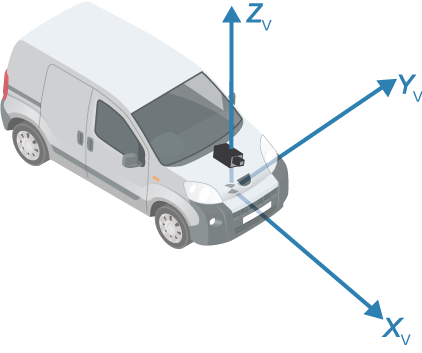
In the vehicle coordinate system
(XV,
YV,
ZV) defined by
vehicleToImage:
The XV-axis points forward from the vehicle.
The YV-axis points to the left, as viewed when facing forward.
The ZV-axis points up from the ground to maintain the right-handed coordinate system.
The default origin of this coordinate system is on the road surface, directly below the camera center. The focal point of the camera defines this center point.
To change the placement of the origin within the vehicle coordinate system, update
the SensorLocation property.
For more details about the vehicle coordinate system, see Coordinate Systems in Automated Driving Toolbox.
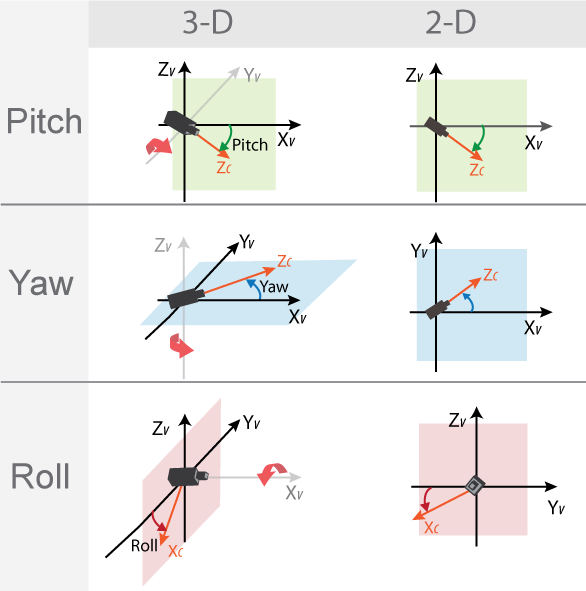
The monocular camera sensor uses clockwise positive angle directions when looking in the positive direction of the Z-, Y-, and X-axes, respectively.
Extended Capabilities
Version History
Introduced in R2017a