adjustHeight
Adjust height of waypoints in trajectory object to match road height
Since R2025a
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
adjustHeight(
adjusts the height of the waypoints in the input trajectory object
trajectory,rrMap)trajectory to match the height of the road in the input RoadRunner HD Map rrMap.
adjustHeight(
adjusts the height of the waypoints in the input trajectory object
trajectory,rrApp)trajectory to match the height of the road in the scene associated
with the input RoadRunner application rrApp.
adjustHeight(
adjusts the height of the waypoints in the input trajectory object
trajectory,scenario)trajectory to match the height of the road in the input driving
scenario scenario.
heightAdjustedTrajectory = adjustHeight(___)Trajectory
object heightAdjustedTrajectory using any combination of the input
arguments from the previous syntaxes. The syntax does not update the trajectory in the input
trajectory object trajectory.
Examples
Load a MAT file containing an ego trajectory object and a RoadRunner HD Map object into the workspace.
load("adjustHeightData.mat","egoTrajectory","rrHDMap")
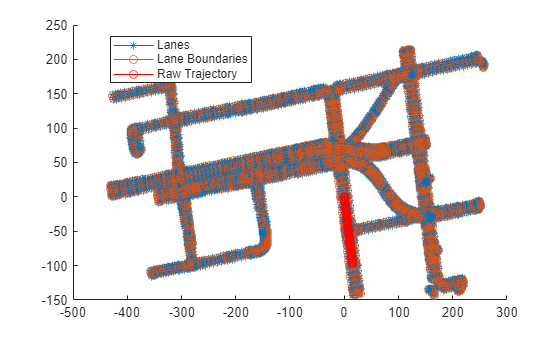
Display the trajectory in the loaded trajectory object overlaid on the road network in the loaded RoadRunner HD Map object.
plot(rrHDMap) hold on plot3(egoTrajectory.Position(:,1),egoTrajectory.Position(:,2),egoTrajectory.Position(:,3),"ro-") hold off legend("Lanes","Lane Boundaries","Raw Trajectory")
Adjust the height of the waypoints in the loaded trajectory object to match the height of the road in the loaded RoadRunner HD Map object.
heightAdjustedTrajectory = adjustHeight(egoTrajectory,rrHDMap);
Warning: Duplicate data points have been detected and removed - corresponding values have been averaged.
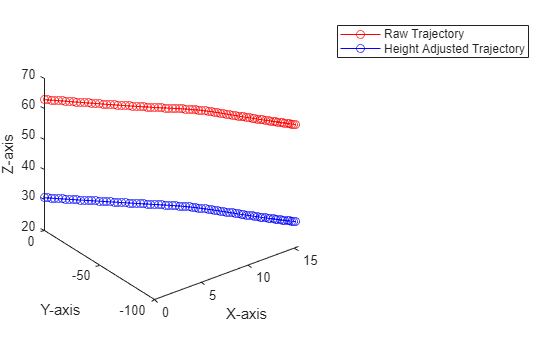
Display the raw trajectory and the height adjusted trajectory.
figure plot3(egoTrajectory.Position(:,1),egoTrajectory.Position(:,2),egoTrajectory.Position(:,3),"ro-") hold on plot3(heightAdjustedTrajectory.Position(:,1),heightAdjustedTrajectory.Position(:,2),heightAdjustedTrajectory.Position(:,3),"bo-") hold off legend("Raw Trajectory","Height Adjusted Trajectory") xlabel("X-axis") ylabel("Y-axis") zlabel("Z-axis")
Input Arguments
Output Arguments
Version History
Introduced in R2025a
See Also
roadrunnerHDMap | drivingScenario | roadBoundaries | Trajectory | GPSData | CameraData | LidarData | recordedSensorData