magcal
Magnetometer calibration coefficients
Description
Examples
Generate uncalibrated magnetometer data lying on an ellipsoid.
c = [-50; 20; 100]; % Ellipsoid center r = [30; 20; 50]; % Semiaxis radii [x,y,z] = ellipsoid(c(1),c(2),c(3),r(1),r(2),r(3),20); D = [x(:),y(:),z(:)];
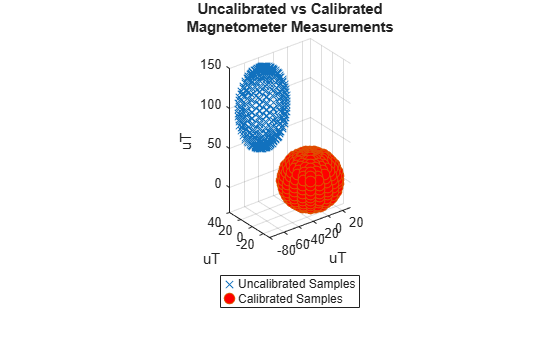
Correct the magnetometer data so that it lies on a sphere. The option for the calibration is set by default to 'auto'.
[A,b,expmfs] = magcal(D); % Calibration coefficients expmfs % Display the expected magnetic field strength in uT
expmfs = 31.0723
C = (D-b)*A; % Calibrated dataVisualize the uncalibrated and calibrated magnetometer data.
figure(1) plot3(x(:),y(:),z(:),"LineStyle","none","Marker","X","MarkerSize",8) hold on grid(gca,"on") plot3(C(:,1),C(:,2),C(:,3),"LineStyle","none","Marker","o", ... "MarkerSize",8,"MarkerFaceColor","r") axis equal xlabel("uT") ylabel("uT") zlabel("uT") legend("Uncalibrated Samples","Calibrated Samples","Location","southoutside") title("Uncalibrated vs Calibrated" + newline + "Magnetometer Measurements") hold off
Input Arguments
Output Arguments
More About
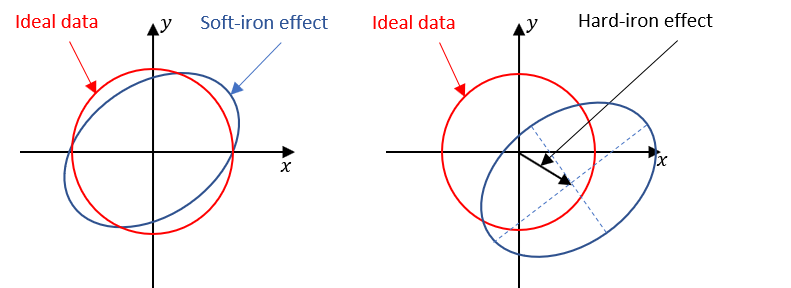
Because a magnetometer usually rotates through a full range of 3-D rotation, the ideal measurements from a magnetometer should form a perfect sphere centered at the origin if the magnetic field is unperturbed. However, due to distorting magnetic fields from the sensor circuit board and the surrounding environment, the spherical magnetic measurements can be perturbed. In general, two effects exist.
The soft-iron effect is described as the distortion of the ellipsoid from a sphere and the tilt of the ellipsoid, as shown in the left figure. This effect is caused by disturbances that influence the magnetic field but may not generate their own magnetic field. For example, metals such as nickel and iron can cause this kind of distortion.
The hard-iron effect is described as the offset of the ellipsoid center from the origin. This effect is produced by materials that exhibit a constant, additive field to the earth's magnetic field. This constant additive offset is in addition to the soft-iron effect as shown in the figure on the right.
The underlying algorithm in magcal determines the best-fit
ellipsoid to the raw sensor readings and attempts to "invert" the ellipsoid to produce a
sphere. The goal is to generate a correction matrix A to account for
the soft-iron effect and a vector b to account for the hard-iron
effect. The three output options, 'eye', 'diag' and
'sym' correspond to three parameter-solving algorithms, and the
'auto' option chooses among these three options to give the best
fit.
References
[1] Ozyagcilar, T. "Calibrating an eCompass in the Presence of Hard and Soft-iron Interference." Freescale Semiconductor Ltd. 1992, pp. 1-17.