simsd
Simulate linear models with uncertainty using Monte Carlo method
Description
simsd simulates linear models using the Monte Carlo
method. The command performs multiple simulations using different values of the
uncertain parameters of the model, and different realizations of additive noise and
simulation initial conditions. simsd uses Monte Carlo techniques to
generate response uncertainty, whereas sim generates the uncertainty using the Gauss Approximation
Formula.
simsd(
simulates and plots the response of 10 perturbed realizations of the identified
model sys,udata)sys. Simulation input data udata
is used to compute the simulated response.
The parameters of the perturbed realizations of sys are
consistent with the parameter covariance of the original model,
sys. If sys does not contain
parameter covariance information, the 10 simulated responses are identical. For
information about how the parameter covariance information is used to generate
the perturbed models, see Generating Perturbations of Identified Model.
simsd(
simulates the system response using the simulation behavior specified in the
option set sys,udata,N,opt)opt. Use opt to specify
uncertainties in the initial conditions and include the effect of additive
disturbances.
The simulated responses are all identical if sys does not
contain parameter covariance information, and you do not specify additive noise
or covariance values for initial states. You specify these values in the
AddNoise and X0Covariance options of
opt.
Examples
Load the estimation data.
load iddata1 z1
z1 is an iddata object that stores the input-output estimation data.
Estimate a third-order state-space model.
sys = ssest(z1,3);
Simulate the response of the estimated model using the Monte Carlo method and input estimation data, and plot the response.
simsd(sys,z1);
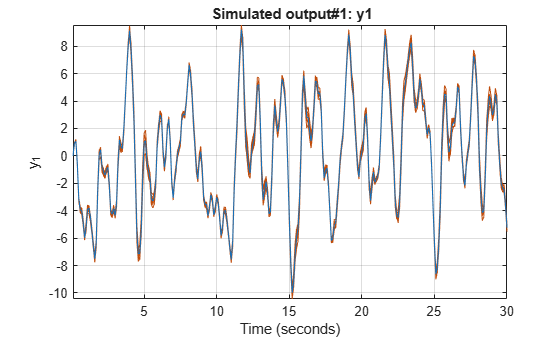
The blue line plots the simulated response of the original nominal model sys. The green lines plot the simulated response of 10 perturbed realizations of sys.
Simulate an estimated model using the Monte Carlo method for a specified number of model perturbations.
Estimate a second-order state-space model using estimation data. Obtain sys in the observability canonical form.
load iddata3 z3 sys = ssest(z3,2,'Form','canonical');
Compute the simulated response of the estimated model using the Monte Carlo method, and plot the responses. Specify the number of random model perturbations as 20.
N = 20; simsd(sys,z3,N)
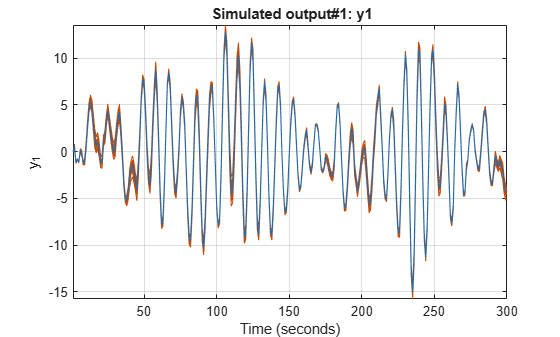
The blue line plots the simulated response of the original nominal model sys. The green lines plot the simulated response of the 20 perturbed realizations of sys.
You can also obtain the simulated response for each perturbation of sys. No plot is generated when you use this syntax.
y = simsd(sys,z3,N);
y is the simulated response, returned as a cell array of N+1 elements. y{1} contains the nominal response for sys. The remaining elements contain the simulated response for the N perturbed realizations.
Load time series data.
load iddata9 z9
z9 is an iddata object with 200 output data samples and no inputs.
Estimate a sixth-order AR model using the least-squares algorithm.
sys = ar(z9,6,'ls');For time series data, specify the desired simulation length, Ns = 200 using an Ns-by-0 input data set.
data = iddata([],zeros(200,0),z9.Ts);
Set the initial conditions to use the initial samples of the time series as historical output samples. The past data is mapped to the initial states of each perturbed system individually.
IC = struct('Input',[],'Output',z9.y(1:6)); opt = simsdOptions('InitialCondition',IC);
Simulate the model using Monte Carlo method and specified initial conditions. Specify the number of random model perturbations as 20.
simsd(sys,data,20,opt)
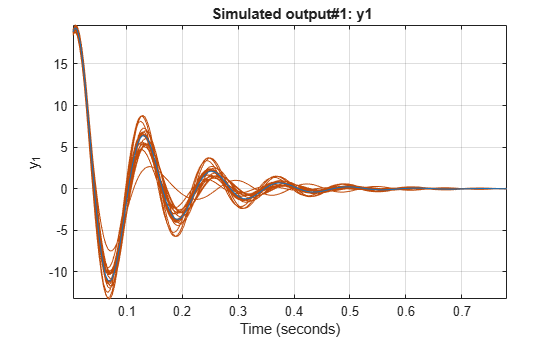
The blue line plots the simulated response of the original nominal model sys. The green lines plot the simulated response of the 20 perturbed realizations of sys.
Load data, and split it into estimation and simulation data.
load iddata3
ze = z3(1:200);
zsim = z3(201:256);Estimate a second-order state-space model sys using estimation data. Specify that no parameter covariance data is generated. Obtain sys in the observability canonical form.
opt = ssestOptions('EstimateCovariance',false); sys = ssest(ze,2,'Form','canonical',opt);
Set the initial conditions for simulating the estimated model. Specify initial state values x0 for the two states and also the covariance of initial state values x0Cov. The covariance is specified as a 2-by-2 matrix because there are two states.
x0 = [1.2; -2.4]; x0Cov = [0.86 -0.39; -0.39 1.42]; opt = simsdOptions('InitialCondition',x0,'X0Covariance',x0Cov);
Simulate the model using Monte Carlo method and specified initial conditions. Specify the number of random model perturbations as 100.
simsd(sys,zsim,100,opt)
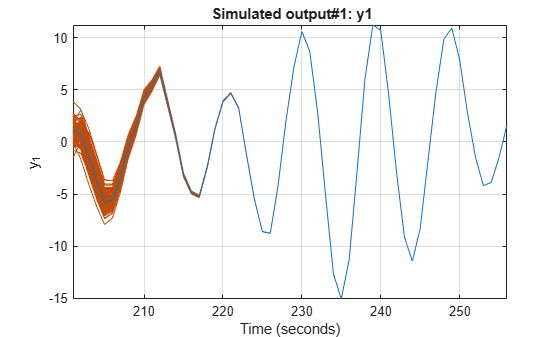
The blue line plots the simulated response of the original nominal model sys. The green lines plot the simulated response of the 100 perturbed realizations of sys. The software uses a different realization of the initial states to simulate each perturbed model. Initial states are drawn from a Gaussian distribution with mean InitialCondition and covariance X0Covariance.
Load the estimation data.
load iddata1 z1
z1 is an idddata object that stores 300 input-output estimation data samples.
Estimate a second-order state-space model using the estimation data.
sys = ssest(z1,2);
Create a default option set for simsd, and modify the option set to add noise.
opt = simsdOptions; opt.AddNoise = true;
Compute the simulated response of the estimated model using the Monte Carlo method. Specify the number of random model perturbations as 20, and simulate the model using the specified option set.
[y,y_sd] = simsd(sys,z1,20,opt);
y is the simulated response, returned as a cell array of 21 elements. y{1} contains the nominal, noise-free response for sys. The remaining elements contain the simulated response for the 20 perturbed realizations of sys with additive disturbances added to each response.
y_sd is the estimated standard deviation of simulated response, returned as an iddata object with no inputs. The standard deviations are computed from the 21 simulated outputs. To access the standard deviation, use y_sd.OutputData.
Input Arguments
Output Arguments
More About
Version History
Introduced before R2006a
See Also
simsdOptions | getcov | sim | rsample | showConfidence