ddensd
Solve delay differential equations (DDEs) of neutral type
Syntax
Description
sol = ddensd(ddefun,dely,delyp,history,tspan)
| y '(t) = f(t, y(t), y(dy1),..., y(dyp), y '(dyp1),..., y '(dypq)) | (1) |
t is the independent variable representing time.
dyi is any of p solution delays.
dypj is any of q derivative delays.
Examples
Solve the following neutral DDE, presented by Paul, for  .
.

The solution history is  for
for  .
.
Create a new program file in the editor. This file will contain a main function and four local functions.
Define the first-order DDE as a local function named ddefun.
function yp = ddefun(t,y,ydel,ypdel) yp = 1 + y - 2*ydel^2 - ypdel; end
Define the solution delay as a local function named dely.
function dy = dely(t,y) dy = t/2; end
Define the derivative delay as a local function named delyp.
function dyp = delyp(t,y) dyp = t-pi; end
Define the solution history as a local function named history.
function y = history(t) y = cos(t); end
Define the interval of integration and solve the DDE using ddensd. Add this code to the main function.
tspan = [0 pi]; sol = ddensd(@ddefun,@dely,@delyp,@history,tspan);
Evaluate the solution at 100 equally spaced points between  and
and  . Add this code to the main function.
. Add this code to the main function.
tn = linspace(0,pi); yn = deval(sol,tn);
Plot the results. Add this code to the main function.
plot(tn,yn); xlim([0 pi]); ylim([-1.2 1.2]); xlabel('time t'); ylabel('solution y');
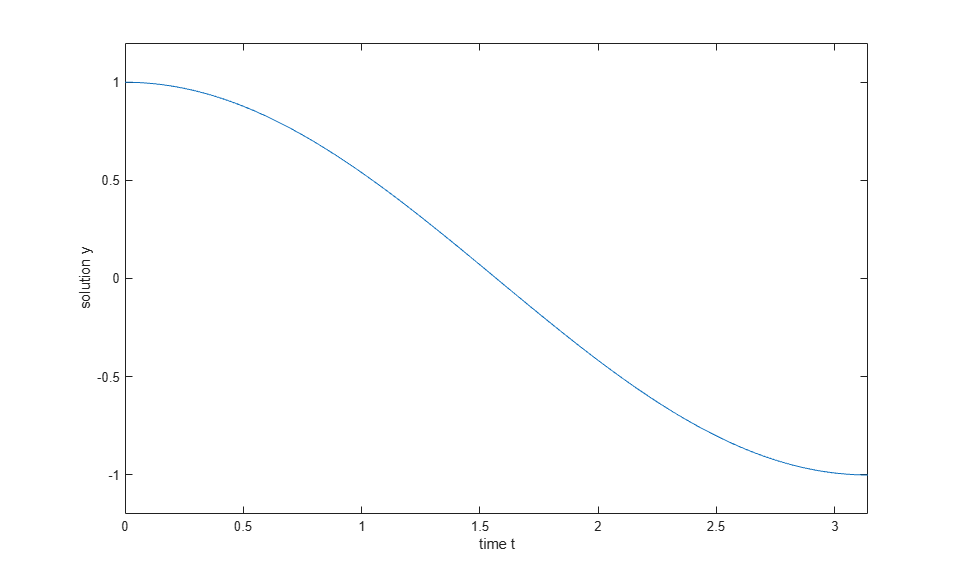
Run your entire program to calculate the solution and display the plot. The file ddex4.m contains the complete code for this example. To see the code in an editor, type edit ddex4 at the command line.
Input Arguments
Output Arguments
More About
Algorithms
For information about the algorithm used in this solver, see Shampine [2].
References
[1] Paul, C.A.H. “A Test Set of Functional Differential Equations.” Numerical Analysis Reports. No. 243. Manchester, UK: Math Department, University of Manchester, 1994.
[2] Shampine, L.F. “Dissipative Approximations to Neutral DDEs.” Applied Mathematics & Computation. Vol. 203, Number 2, 2008, pp. 641–648.
Version History
Introduced in R2012b