isomorphism
Compute isomorphism between two graphs
Description
P = isomorphism(G1,G2)G1 and G2,
if one exists. If no isomorphism exists, then P is an empty
array.
P = isomorphism(___,Name,Value)'NodeVariables' and a list of node
variables to indicate that the isomorphism must preserve these variables to be
valid.
Examples
Create and plot two directed graphs, and then calculate the isomorphism relation between them.
G1 = digraph([1 1 1 2 3 4],[2 3 4 4 4 1]); G2 = digraph([3 3 3 2 1 4],[1 4 2 3 2 2]); subplot(1,2,1) plot(G1) subplot(1,2,2) plot(G2)
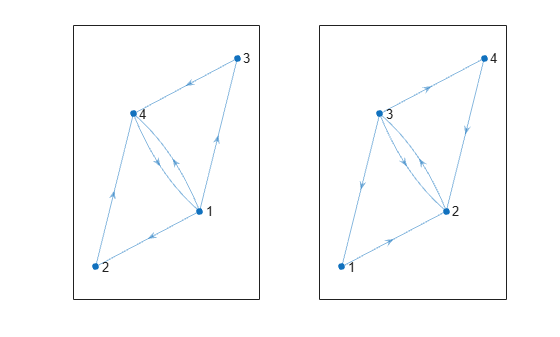
p = isomorphism(G1,G2)
p = 4×1
3
1
4
2
The result indicates that reordernodes(G2,p) has the same structure as G1.
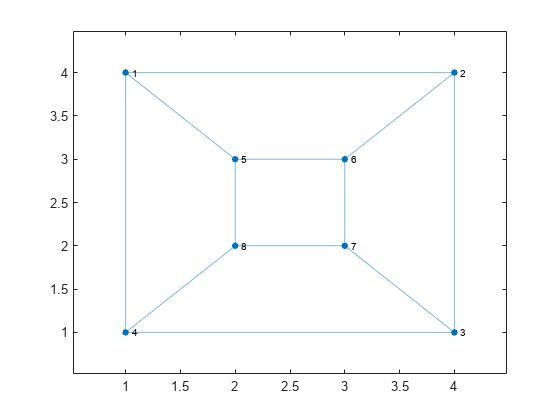
Create and plot two graphs, G1 and G2.
G1 = graph([1 1 1 2 2 3 3 4 5 5 7 7],[2 4 5 3 6 4 7 8 6 8 6 8]); plot(G1,'XData',[1 4 4 1 2 3 3 2],'YData',[4 4 1 1 3 3 2 2])
G2 = graph({'a' 'a' 'a' 'b' 'b' 'b' 'c' 'c' 'c' 'd' 'd' 'd'}, ...
{'g' 'h' 'i' 'g' 'h' 'j' 'g' 'i' 'j' 'h' 'i' 'j'});
plot(G2,'XData',[1 2 2 2 1 2 1 1],'YData',[4 4 3 2 3 1 2 1])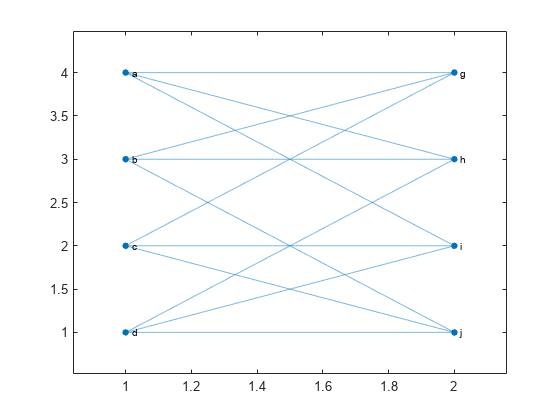
Compute the isomorphism relation between the graphs, if one exists. The result indicates that the graph nodes can be permuted to represent the same graph despite their different labels and layouts.
p = isomorphism(G1,G2)
p = 8×1
1
2
5
3
4
7
6
8
Compute two different isomorphism relations between two graphs. One of the relations preserves a node property, while the other ignores it.
Create two similar graphs. Add a node property Color to each of the graphs.
G1 = graph({'d' 'e' 'f'},{'e' 'f' 'd'});
G1.Nodes.Color = {'blue' 'red' 'red'}';
G2 = graph({'a' 'b' 'c'},{'b' 'c' 'a'});
G2.Nodes.Color = {'red' 'red' 'blue'}';Plot the graphs side-by-side in the same figure. Color the nodes red that have Color = 'red'.
subplot(1,2,1)
p1 = plot(G1);
highlight(p1,{'e' 'f'},'NodeColor','r')
subplot(1,2,2)
p2 = plot(G2);
highlight(p2,{'a' 'b'},'NodeColor','r')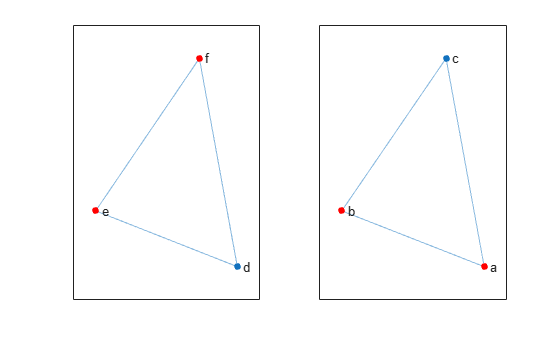
Compute the isomorphism between the graphs, ignoring the Color property.
p = isomorphism(G1,G2)
p = 3×1
1
2
3
Compute the isomorphism again, but this time preserve the value of the Color property in the comparison. isomorphism returns a different permutation that preserves the Color property.
p = isomorphism(G1,G2,'NodeVariables','Color')
p = 3×1
3
1
2
View the nodes in G1 and G2 that the isomorphism matches together.
[G1.Nodes.Name, G2.Nodes.Name(p)]
ans = 3×2 cell
{'d'} {'c'}
{'e'} {'a'}
{'f'} {'b'}
Input Arguments
Name-Value Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2016b