reposition
Description
repositionedR = reposition(R,tform)medicalref3d
object R according to the geometric transformation
tform, and returns a new medicalref3d object,
repositionedR. Use this function to update the position of a medical
volume whose spatial referencing is defined by R in the patient
coordinate system.
Examples
Apply a geometric transformation that changes the intrinsic-to-world mapping described by a medicalref3d object. The medicalref3d object describes the position of a medical volume in the patient coordinate system, and updating the mapping repositions the volume in world coordinates.
Download and Import Images
Download a modified version of the 3-D CT and MRI data sets from The Retrospective Image Registration Evaluation (RIRE) Dataset, provided by Dr. Michael Fitzpatrick. For more information, see the RIRE Project homepage. The modified data set contains one CT scan and one MRI scan from the same patient stored in the NRRD file format. The size of the entire data set is approximately 35 MB. Download the data set from the MathWorks® website, then unzip the folder.
zipFile = matlab.internal.examples.downloadSupportFile("medical", ... "MedicalRegistrationNRRDdataLPS.zip"); filepath = fileparts(zipFile); unzip(zipFile,filepath)
Read the CT and MRI volumes as medicalVolume objects.
filenameCT = fullfile(filepath,"supportfilesNRRD","Patient007CT.nrrd"); movingVolume = medicalVolume(filenameCT); filenameMRI = fullfile(filepath,"supportfilesNRRD","Patient007MRT1.nrrd"); fixedVolume = medicalVolume(filenameMRI);
Extract the medicalref3d object that describes the spatial referencing for the moving volume.
R = movingVolume.VolumeGeometry
R =
medicalref3d with properties:
VolumeSize: [512 512 28]
Position: [28×3 double]
VoxelDistances: {[0.6536 0 0] [0 0.6536 0] [0 0 4]}
PatientCoordinateSystem: "LPS+"
PixelSpacing: [0.6536 0.6536]
IsAffine: 1
IsAxesAligned: 1
IsMixed: 0
Apply Transformation to Spatial Referencing of Moving Volume
Apply a geometric transformation calculated using the Moment of Mass registration technique in the Medical Registration Estimator app. To learn how to calculate and export the transformation from the app, see Rigid Registration Using Medical Registration Estimator App. Specify the 4-by-4 transformation matrix from the app. The transformation maps the moving volume to the fixed volume, in the patient coordinate system.
A = [1.0000 0.0041 -0.0004 -6.0548;
-0.0041 1.0000 -0.0020 -19.9711;
0.0042 0.0200 1.0000 -5.4140;
0 0 0 1.0000];Create a geometric transformation object defined by the matrix A.
tform = affinetform3d(A);
Apply the transformation to update the spatial referencing associated with the moving volume.
repositionedR = reposition(R,tform)
repositionedR =
medicalref3d with properties:
VolumeSize: [512 512 28]
Position: [28×3 double]
VoxelDistances: {[0.6536 -0.0027 0.0027] [0.0027 0.6536 0.0131] [-0.0016 -0.0080 4]}
PatientCoordinateSystem: "LPS+"
PixelSpacing: [0.6537 0.6536]
IsAffine: 1
IsAxesAligned: 0
IsMixed: 0
Create a new medicalVolume object that associates the moving voxel data with the repositioned spatial referencing object.
repositionedVolume = medicalVolume(movingVolume.Voxels,repositionedR);
Display Repositioned Volume
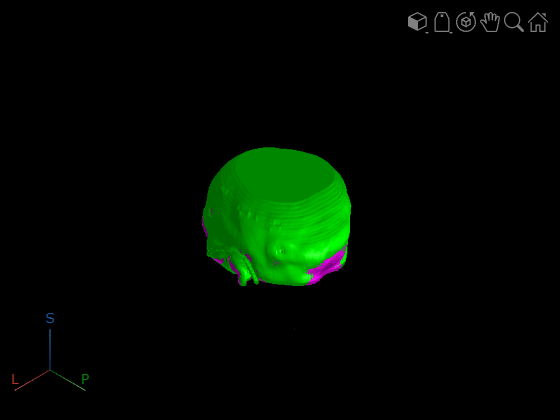
Display the fixed and repositioned moving volume. The volumes are now aligned in the patient coordinate system.
viewer2 = viewer3d(BackgroundColor="black",BackgroundGradient="off"); volshow(fixedVolume, ... Parent=viewer2, ... RenderingStyle="Isosurface", ... IsosurfaceValue=0.05, ... Colormap=[1 0 1], ... Alphamap=1); volshow(repositionedVolume, ... Parent=viewer2, ... RenderingStyle="Isosurface", ... IsosurfaceValue=0.05, ... Colormap=[0 1 0], ... Alphamap=1);
Input Arguments
Output Arguments
Version History
Introduced in R2025a