nlmpcmove
Compute optimal control action for nonlinear MPC controller
Syntax
Description
Nonlinear MPC
Multistage Nonlinear MPC
mv = nlmpcmove(msobj,x,lastmv,simdata)simdata structure, which contains measured
disturbances, run-time bounds, parameters for the state and stage functions, and initial
guesses for state and manipulated variable trajectories. In general use the following
syntax to return a new simdata (containing updated initial guesses)
as a second output argument.
Examples
Create a nonlinear MPC controller with six states, six outputs, and four inputs.
nx = 6; ny = 6; nu = 4; nlobj = nlmpc(nx,ny,nu);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the controller sample time and horizons.
Ts = 0.4; p = 30; c = 4; nlobj.Ts = Ts; nlobj.PredictionHorizon = p; nlobj.ControlHorizon = c;
Specify the prediction model state function and the Jacobian of the state function. For this example, use a model of a flying robot.
nlobj.Model.StateFcn = "FlyingRobotStateFcn"; nlobj.Jacobian.StateFcn = "FlyingRobotStateJacobianFcn";
Specify a custom cost function for the controller that replaces the standard cost function.
nlobj.Optimization.CustomCostFcn = @(X,U,e,data) Ts*sum(sum(U(1:p,:))); nlobj.Optimization.ReplaceStandardCost = true;
Specify a custom constraint function for the controller.
nlobj.Optimization.CustomEqConFcn = @(X,U,data) X(end,:)';
Specify linear constraints on the manipulated variables.
for ct = 1:nu nlobj.MV(ct).Min = 0; nlobj.MV(ct).Max = 1; end
Validate the prediction model and custom functions at the initial states (x0) and initial inputs (u0) of the robot.
x0 = [-10;-10;pi/2;0;0;0]; u0 = zeros(nu,1); validateFcns(nlobj,x0,u0);
Model.StateFcn is OK. Jacobian.StateFcn is OK. No output function specified. Assuming "y = x" in the prediction model. Optimization.CustomCostFcn is OK. Optimization.CustomEqConFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
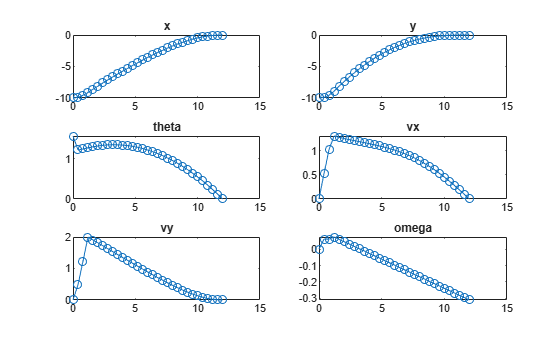
Compute the optimal state and manipulated variable trajectories, which are returned in the info.
[~,~,info] = nlmpcmove(nlobj,x0,u0);
Slack variable unused or zero-weighted in your custom cost function. All constraints will be hard.
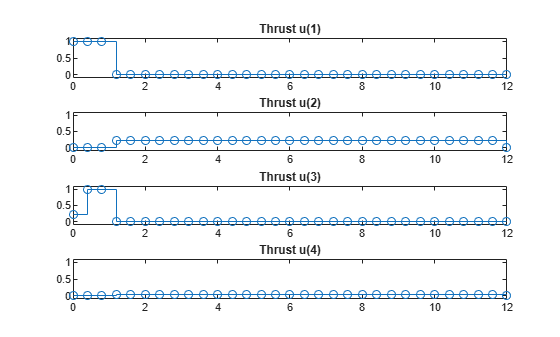
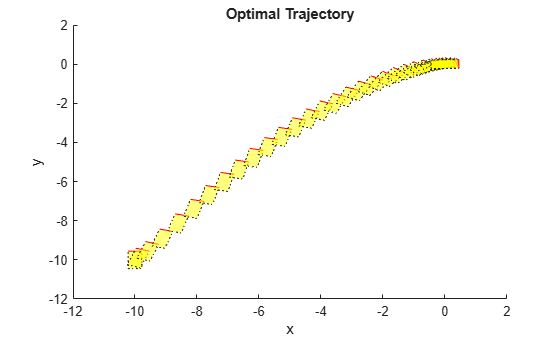
Plot the optimal trajectories.
FlyingRobotPlotPlanning(info,Ts)
Optimal fuel consumption = 1.869736
Create a nonlinear MPC controller with four states, two outputs, and one input.
nlobj = nlmpc(4,2,1);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the sample time and horizons of the controller.
Ts = 0.1; nlobj.Ts = Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
Specify the state function for the controller, which is in the file pendulumDT0.m. This discrete-time model integrates the continuous time model defined in pendulumCT0.m using a multistep forward Euler method.
nlobj.Model.StateFcn = "pendulumDT0";
nlobj.Model.IsContinuousTime = false;The prediction model uses an optional parameter, Ts, to represent the sample time. Specify the number of parameters.
nlobj.Model.NumberOfParameters = 1;
Specify the output function of the model, passing the sample time parameter as an input argument.
nlobj.Model.OutputFcn = @(x,u,Ts) [x(1); x(3)];
Define standard constraints for the controller.
nlobj.Weights.OutputVariables = [3 3]; nlobj.Weights.ManipulatedVariablesRate = 0.1; nlobj.OV(1).Min = -10; nlobj.OV(1).Max = 10; nlobj.MV.Min = -100; nlobj.MV.Max = 100;
Validate the prediction model functions.
x0 = [0.1;0.2;-pi/2;0.3];
u0 = 0.4;
validateFcns(nlobj, x0, u0, [], {Ts});Model.StateFcn is OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Only two of the plant states are measurable. Therefore, create an extended Kalman filter for estimating the four plant states. Its state transition function is defined in pendulumStateFcn.m and its measurement function is defined in pendulumMeasurementFcn.m.
EKF = extendedKalmanFilter(@pendulumStateFcn,@pendulumMeasurementFcn);
Define initial conditions for the simulation, initialize the extended Kalman filter state, and specify a zero initial manipulated variable value.
x = [0;0;-pi;0]; y = [x(1);x(3)]; EKF.State = x; mv = 0;
Specify the output reference value.
yref = [0 0];
Create an nlmpcmoveopt object, and specify the sample time parameter.
nloptions = nlmpcmoveopt;
nloptions.Parameters = {Ts};Run the simulation for 10 seconds. During each control interval:
Correct the previous prediction using the current measurement.
Compute optimal control moves using
nlmpcmove. This function returns the computed optimal sequences innloptions. Passing the updated options object tonlmpcmovein the next control interval provides initial guesses for the optimal sequences.Predict the model states.
Apply the first computed optimal control move to the plant, updating the plant states.
Generate sensor data with white noise.
Save the plant states.
Duration = 10; xHistory = x; for ct = 1:(Duration/Ts) % Correct previous prediction xk = correct(EKF,y); % Compute optimal control moves [mv,nloptions] = nlmpcmove(nlobj,xk,mv,yref,[],nloptions); % Predict prediction model states for the next iteration predict(EKF,[mv; Ts]); % Implement first optimal control move x = pendulumDT0(x,mv,Ts); % Generate sensor data y = x([1 3]) + randn(2,1)*0.01; % Save plant states xHistory = [xHistory x]; end
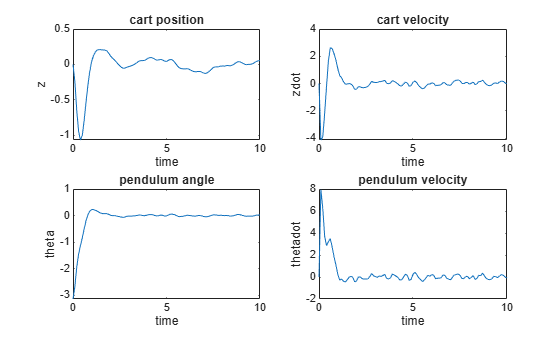
Plot the resulting state trajectories.
figure subplot(2,2,1) plot(0:Ts:Duration,xHistory(1,:)) xlabel('time') ylabel('z') title('cart position') subplot(2,2,2) plot(0:Ts:Duration,xHistory(2,:)) xlabel('time') ylabel('zdot') title('cart velocity') subplot(2,2,3) plot(0:Ts:Duration,xHistory(3,:)) xlabel('time') ylabel('theta') title('pendulum angle') subplot(2,2,4) plot(0:Ts:Duration,xHistory(4,:)) xlabel('time') ylabel('thetadot') title('pendulum velocity')
This example shows how to create and simulate a simple multistage MPC controller in closed loop, without using initial guesses, with the MATLAB® function nlmpcmove.
Create Multistage MPC Controller
Create a multistage nonlinear MPC object with a five-step horizon, one state, and one manipulated variable.
msobj = nlmpcMultistage(5,1,1);
Write a simple state function as a string.
sstr = "function xdot = mystatefcn(x,u)" + newline + ... "xdot = u-sin(x);" + newline + "end";
Write the string to the mystatefcn.m file.
sfid=fopen("mystatefcn.m","w"); fwrite(sfid,sstr,"char"); fclose(sfid);
Write a simple cost function as a string.
cstr = "function c = mycostfcn(k,x,u)" + newline + ... "c = abs(u)/k+k*x^2;" + newline + "end";
Write the string to the mycostfcn.m file.
cfid=fopen("mycostfcn.m","w"); fwrite(cfid,cstr,"char"); fclose(cfid);
Alternatively, you can write your state and cost MATLAB functions in the current folder (which is recommended because local functions are not supported for the generation of deployment code).
If files have not yet been written to the hard disk pause five second before accessing them.
if ~exist("mystatefcn","file") pause(5) end
Specify the state transition function for the prediction model.
msobj.Model.StateFcn = "mystatefcn";Specify the cost functions for last three stages.
for i=3:6 msobj.Stages(i).CostFcn = "mycostfcn"; end
Note that, because the Jacobian of the state function is not supplied here, nlmpcmove needs to numerically calculate them at each time step, which negatively affects performance. As a best practice, supply the Jacobian of the state function, as shown in Simulate Multistage Nonlinear MPC Controller Using Initial Guesses. You can also automatically generate a Jacobian function using generateJacobianFunction.
Simulate Controller in Closed Loop
Initialize the plant state and input.
x=3; mv=0;
Validate functions.
validateFcns(msobj,x,mv);
Model.StateFcn is OK. "CostFcn" of the following stages [3 4 5 6] are OK. Analysis of user-provided model, cost, and constraint functions complete.
Simulate the control loop for 5 steps, without updating the initial guess. Use the Euler method, that is, dx(t)/dt ~ (x(t+1)-x(t))/Ts, to simulate the plant.
for k=1:5 % calculate move (without initial guess) mv = nlmpcmove(msobj, x, mv); % update plant state assuming Ts=0.2s x=x+0.2*mystatefcn(x,mv); end
Note that, because initial guesses are not supplied as an input argument, nlmpcmove needs to recalculate them at each time step, which negatively affects performance. Not supplying initial guesses can be an acceptable starting point, but in general is not suggested. As a best practice, use updated initial guesses at each time step, as shown in Simulate Multistage Nonlinear MPC Controller Using Initial Guesses, so that nlmpcmove does not need to recalculate them at each time step (in the same example you also use ode45 to calculate the evolution of the plant state until the next control interval).
Display the final values of the state and manipulated variables.
disp(['Final value of x =' num2str(x)])Final value of x =1.3074
disp(['Final value of mv =' num2str(mv)])Final value of mv =-0.35102
This example shows how to create and simulate a simple multistage MPC controller in closed loop using initial guesses, with the MATLAB® function nlmpcmove.
Create Multistage MPC Controller
Create a multistage MPC object with a seven-steps horizon, one state, and one manipulated variable.
msobj = nlmpcMultistage(7,1,1);
Defining your state and cost functions as separate files in the current folder on in a folder on the MATLAB path is recommended, as local functions are not supported for the generation of C/C++ deployment code. However, for this example, the state, cost, and state Jacobian functions are defined as local functions at the end of the example.
Specify the state transition function for the prediction model.
msobj.Model.StateFcn = @mystatefcn;
As a best practice, use Jacobians whenever they are available, otherwise the solver must compute it numerically. You can also automatically generate a Jacobian function using generateJacobianFunction.
Specify the Jacobian of the state transition function.
msobj.Model.StateJacFcn = @mystatejac;
Specify the cost functions for all stages except the first.
for i=2:8 msobj.Stages(i).CostFcn = @mycostfcn; end
Define Initial Conditions, Create Data Structure, and Validate Functions
Initialize the plant state and input.
x=3; mv=0;
Create the initial simulation data structure.
simdata = getSimulationData(msobj)
simdata = struct with fields:
InitialGuess: []
Validate functions and the data structure.
validateFcns(msobj,x,mv,simdata);
Model.StateFcn is OK. Model.StateJacFcn is OK. "CostFcn" of the following stages [2 3 4 5 6 7 8] are OK. Analysis of user-provided model, cost, and constraint functions complete.
Simulate Controller in Closed Loop
Simulate the control loop for 5 steps.
for k=1:5 % calculate move and update simdata [mv,simdata] = nlmpcmove(msobj, x, mv, simdata); % simulate plant for one sample time [~,xhist] = ode45(@(t,xode) mystatefcn(xode,mv),[0 msobj.Ts],x); % update plant state x = xhist(end); end
Because updated initial guesses are supplied as an input argument within the simdata structure, nlmpcmove does not need to recalculate them at each time step, which saves computation time and improves performance. Updating initial guesses at every time step is a best practice.
Display the last values of the state and manipulated variables.
disp(['Final value of x =' num2str(x)])Final value of x =-0.039939
disp(['Final value of mv =' num2str(mv)])Final value of mv =-0.067127
Support Functions
State transition function.
function xdot = mystatefcn(x,u) xdot = u-sin(x); end
Jacobian of the state transition function.
function [A,B] = mystatejac(x,~) A = -cos(x); B = 1; end
Stage cost functions.
function j = mycostfcn(s,x,u) j = abs(u)/s+s*x^2; end
Input Arguments
Output Arguments
Tips
During closed-loop simulations, it is best practice to warm start the nonlinear solver by using the predicted state and manipulated variable trajectories from the previous control interval as the initial guesses for the current control interval. To use these trajectories as initial guesses:
Return the
optoutput argument when callingnlmpcmove. Thisnlmpcmoveoptobject contains any run-time options you specified in the previous call tonlmpcmove, along with the initial guesses for the state (opt.X0) and manipulated variable (opt.MV0) trajectories.Pass this object in as the
optionsinput argument tonlmpcmovefor the next control interval.
These steps are a best practice, even if you do not specify any other run-time options.
Version History
Introduced in R2018b