nlmpc
Nonlinear model predictive controller
Description
A nonlinear model predictive controller computes optimal control moves across the prediction horizon using a nonlinear prediction model, a nonlinear cost function, and nonlinear constraints. For more information on nonlinear MPC, see Nonlinear MPC.
Creation
Syntax
Description
Input Arguments
Properties
Object Functions
nlmpcmove | Compute optimal control action for nonlinear MPC controller |
validateFcns | Examine prediction model and custom functions of nlmpc or
nlmpcMultistage objects for potential problems |
convertToMPC | Convert nlmpc object into one or more mpc
objects |
createParameterBus | Create Simulink bus object and configure Bus Creator block for passing model parameters to Nonlinear MPC Controller block |
Examples
Create a nonlinear MPC controller with four states, two outputs, and one input.
nx = 4; ny = 2; nu = 1; nlobj = nlmpc(nx,ny,nu);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the sample time and horizons of the controller.
Ts = 0.1; nlobj.Ts = Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
Specify the state function for the controller, which is in the file pendulumDT0.m. This discrete-time model integrates the continuous time model defined in pendulumCT0.m using a multistep forward Euler method.
nlobj.Model.StateFcn = "pendulumDT0";
nlobj.Model.IsContinuousTime = false;The discrete-time state function uses an optional parameter, the sample time Ts, to integrate the continuous-time model. Therefore, you must specify the number of optional parameters as 1.
nlobj.Model.NumberOfParameters = 1;
Specify the output function for the controller. In this case, define the first and third states as outputs. Even though this output function does not use the optional sample time parameter, you must specify the parameter as an input argument (Ts).
nlobj.Model.OutputFcn = @(x,u,Ts) [x(1); x(3)];
Validate the prediction model functions for nominal states x0 and nominal inputs u0. Because the prediction model uses a custom parameter, you must pass this parameter to validateFcns.
x0 = [0.1;0.2;-pi/2;0.3];
u0 = 0.4;
validateFcns(nlobj, x0, u0, [], {Ts});Model.StateFcn is OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Create a nonlinear MPC controller with three states, one output, and four inputs. The first two inputs are measured disturbances, the third input is the manipulated variable, and the fourth input is an unmeasured disturbance.
nlobj = nlmpc(3,1,'MV',3,'MD',[1 2],'UD',4);
To view the controller state, output, and input dimensions and indices, use the Dimensions property of the controller.
nlobj.Dimensions
ans = struct with fields:
NumberOfStates: 3
NumberOfOutputs: 1
NumberOfInputs: 4
MVIndex: 3
MDIndex: [1 2]
UDIndex: 4
Specify the controller sample time and horizons.
nlobj.Ts = 0.5; nlobj.PredictionHorizon = 6; nlobj.ControlHorizon = 3;
Specify the prediction model state function, which is in the file exocstrStateFcnCT.m.
nlobj.Model.StateFcn = 'exocstrStateFcnCT';Specify the prediction model output function, which is in the file exocstrOutputFcn.m.
nlobj.Model.OutputFcn = 'exocstrOutputFcn';Validate the prediction model functions using the initial operating point as the nominal condition for testing and setting the unmeasured disturbance state, x0(3), to 0. Because the model has measured disturbances, you must pass them to validateFcns.
x0 = [311.2639; 8.5698; 0]; u0 = [10; 298.15; 298.15]; validateFcns(nlobj,x0,u0(3),u0(1:2)');
Model.StateFcn is OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Create nonlinear MPC controller with six states, six outputs, and four inputs.
nx = 6; ny = 6; nu = 4; nlobj = nlmpc(nx,ny,nu);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the controller sample time and horizons.
Ts = 0.4; p = 30; c = 4; nlobj.Ts = Ts; nlobj.PredictionHorizon = p; nlobj.ControlHorizon = c;
Specify the prediction model state function and the Jacobian of the state function. For this example, use a model of a flying robot.
nlobj.Model.StateFcn = "FlyingRobotStateFcn"; nlobj.Jacobian.StateFcn = "FlyingRobotStateJacobianFcn";
Specify a custom cost function for the controller that replaces the standard cost function.
nlobj.Optimization.CustomCostFcn = @(X,U,e,data) Ts*sum(sum(U(1:p,:))); nlobj.Optimization.ReplaceStandardCost = true;
Specify a custom constraint function for the controller.
nlobj.Optimization.CustomEqConFcn = @(X,U,data) X(end,:)';
Validate the prediction model and custom functions at the initial states (x0) and initial inputs (u0) of the robot.
x0 = [-10;-10;pi/2;0;0;0]; u0 = zeros(nu,1); validateFcns(nlobj,x0,u0);
Model.StateFcn is OK. Jacobian.StateFcn is OK. No output function specified. Assuming "y = x" in the prediction model. Optimization.CustomCostFcn is OK. Optimization.CustomEqConFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Create a nonlinear MPC controller with four states, one output variable, one manipulated variable, and one measured disturbance.
nlobj = nlmpc(4,1,'MV',1,'MD',2);
Specify the controller sample time and horizons.
nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 3;
Specify the state function of the prediction model.
nlobj.Model.StateFcn = 'oxidationStateFcn';Specify the prediction model output function and the output variable scale factor.
nlobj.Model.OutputFcn = @(x,u) x(3); nlobj.OutputVariables.ScaleFactor = 0.03;
Specify the manipulated variable constraints and scale factor.
nlobj.ManipulatedVariables.Min = 0.0704; nlobj.ManipulatedVariables.Max = 0.7042; nlobj.ManipulatedVariables.ScaleFactor = 0.6;
Specify the measured disturbance scale factor.
nlobj.MeasuredDisturbances.ScaleFactor = 0.5;
Compute the state and input operating conditions for three linear MPC controllers using the fsolve function.
opts = optimoptions('fsolve','Display','none'); uLow = [0.38 0.5]; xLow = fsolve(@(x) oxidationStateFcn(x,uLow),[1 0.3 0.03 1],opts); uMedium = [0.24 0.5]; xMedium = fsolve(@(x) oxidationStateFcn(x,uMedium),[1 0.3 0.03 1],opts); uHigh = [0.15 0.5]; xHigh = fsolve(@(x) oxidationStateFcn(x,uHigh),[1 0.3 0.03 1],opts);
Create linear MPC controllers for each of these nominal conditions.
mpcobjLow = convertToMPC(nlobj,xLow,uLow); mpcobjMedium = convertToMPC(nlobj,xMedium,uMedium); mpcobjHigh = convertToMPC(nlobj,xHigh,uHigh);
You can also create multiple controllers using arrays of nominal conditions. The number of rows in the arrays specifies the number controllers to create. The linear controllers are returned as cell array of mpc objects.
u = [uLow; uMedium; uHigh]; x = [xLow; xMedium; xHigh]; mpcobjs = convertToMPC(nlobj,x,u);
View the properties of the mpcobjLow controller.
mpcobjLow
MPC object (created on 19-Apr-2026 10:08:07):
---------------------------------------------
Sampling time: 1 (seconds)
Prediction Horizon: 10
Control Horizon: 3
Plant Model:
--------------
1 manipulated variable(s) -->| 4 states |
| |--> 1 measured output(s)
1 measured disturbance(s) -->| 2 inputs |
| |--> 0 unmeasured output(s)
0 unmeasured disturbance(s) -->| 1 outputs |
--------------
Indices:
(input vector) Manipulated variables: [1 ]
Measured disturbances: [2 ]
(output vector) Measured outputs: [1 ]
Disturbance and Noise Models:
Output disturbance model: default (type "getoutdist(mpcobjLow)" for details)
Measurement noise model: default (unity gain after scaling)
Weights:
ManipulatedVariables: 0
ManipulatedVariablesRate: 0.1000
OutputVariables: 1
ECR: 100000
State Estimation: Default Kalman Filter (type "getEstimator(mpcobjLow)" for details)
Constraints:
0.0704 <= u1 <= 0.7042, u1/rate is unconstrained, y1 is unconstrained
Use built-in "active-set" QP solver with MaxIterations of 120.
Create a nonlinear MPC controller with six states, six outputs, and four inputs.
nx = 6; ny = 6; nu = 4; nlobj = nlmpc(nx,ny,nu);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the controller sample time and horizons.
Ts = 0.4; p = 30; c = 4; nlobj.Ts = Ts; nlobj.PredictionHorizon = p; nlobj.ControlHorizon = c;
Specify the prediction model state function and the Jacobian of the state function. For this example, use a model of a flying robot.
nlobj.Model.StateFcn = "FlyingRobotStateFcn"; nlobj.Jacobian.StateFcn = "FlyingRobotStateJacobianFcn";
Specify a custom cost function for the controller that replaces the standard cost function.
nlobj.Optimization.CustomCostFcn = @(X,U,e,data) Ts*sum(sum(U(1:p,:))); nlobj.Optimization.ReplaceStandardCost = true;
Specify a custom constraint function for the controller.
nlobj.Optimization.CustomEqConFcn = @(X,U,data) X(end,:)';
Specify linear constraints on the manipulated variables.
for ct = 1:nu nlobj.MV(ct).Min = 0; nlobj.MV(ct).Max = 1; end
Validate the prediction model and custom functions at the initial states (x0) and initial inputs (u0) of the robot.
x0 = [-10;-10;pi/2;0;0;0]; u0 = zeros(nu,1); validateFcns(nlobj,x0,u0);
Model.StateFcn is OK. Jacobian.StateFcn is OK. No output function specified. Assuming "y = x" in the prediction model. Optimization.CustomCostFcn is OK. Optimization.CustomEqConFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
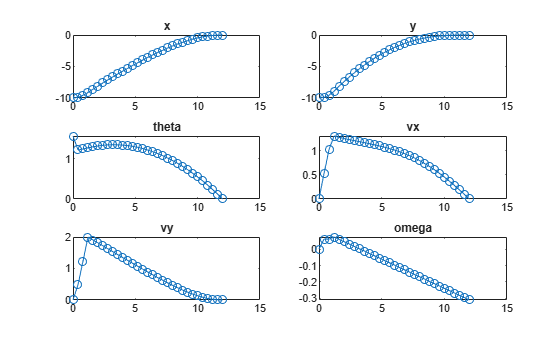
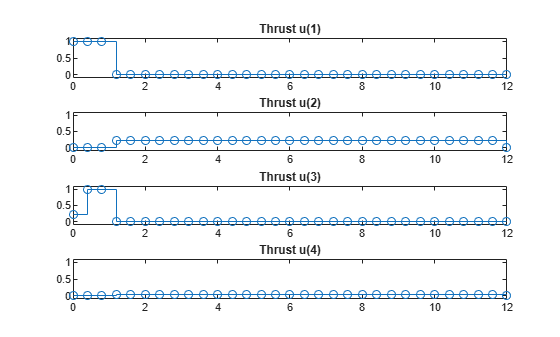
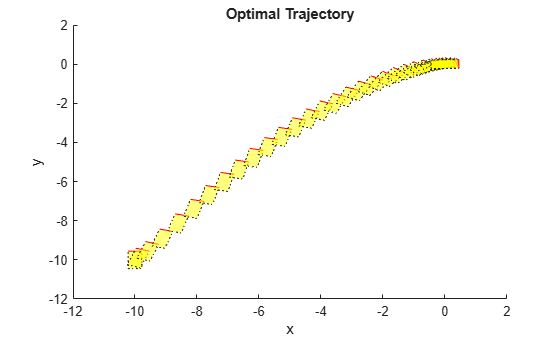
Compute the optimal state and manipulated variable trajectories, which are returned in the info.
[~,~,info] = nlmpcmove(nlobj,x0,u0);
Slack variable unused or zero-weighted in your custom cost function. All constraints will be hard.
Plot the optimal trajectories.
FlyingRobotPlotPlanning(info,Ts)
Optimal fuel consumption = 1.869736
Create a nonlinear MPC controller with four states, two outputs, and one input.
nlobj = nlmpc(4,2,1);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the sample time and horizons of the controller.
Ts = 0.1; nlobj.Ts = Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
Specify the state function for the controller, which is in the file pendulumDT0.m. This discrete-time model integrates the continuous time model defined in pendulumCT0.m using a multistep forward Euler method.
nlobj.Model.StateFcn = "pendulumDT0";
nlobj.Model.IsContinuousTime = false;The prediction model uses an optional parameter, Ts, to represent the sample time. Specify the number of parameters.
nlobj.Model.NumberOfParameters = 1;
Specify the output function of the model, passing the sample time parameter as an input argument.
nlobj.Model.OutputFcn = @(x,u,Ts) [x(1); x(3)];
Define standard constraints for the controller.
nlobj.Weights.OutputVariables = [3 3]; nlobj.Weights.ManipulatedVariablesRate = 0.1; nlobj.OV(1).Min = -10; nlobj.OV(1).Max = 10; nlobj.MV.Min = -100; nlobj.MV.Max = 100;
Validate the prediction model functions.
x0 = [0.1;0.2;-pi/2;0.3];
u0 = 0.4;
validateFcns(nlobj, x0, u0, [], {Ts});Model.StateFcn is OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Only two of the plant states are measurable. Therefore, create an extended Kalman filter for estimating the four plant states. Its state transition function is defined in pendulumStateFcn.m and its measurement function is defined in pendulumMeasurementFcn.m.
EKF = extendedKalmanFilter(@pendulumStateFcn,@pendulumMeasurementFcn);
Define initial conditions for the simulation, initialize the extended Kalman filter state, and specify a zero initial manipulated variable value.
x = [0;0;-pi;0]; y = [x(1);x(3)]; EKF.State = x; mv = 0;
Specify the output reference value.
yref = [0 0];
Create an nlmpcmoveopt object, and specify the sample time parameter.
nloptions = nlmpcmoveopt;
nloptions.Parameters = {Ts};Run the simulation for 10 seconds. During each control interval:
Correct the previous prediction using the current measurement.
Compute optimal control moves using
nlmpcmove. This function returns the computed optimal sequences innloptions. Passing the updated options object tonlmpcmovein the next control interval provides initial guesses for the optimal sequences.Predict the model states.
Apply the first computed optimal control move to the plant, updating the plant states.
Generate sensor data with white noise.
Save the plant states.
Duration = 10; xHistory = x; for ct = 1:(Duration/Ts) % Correct previous prediction xk = correct(EKF,y); % Compute optimal control moves [mv,nloptions] = nlmpcmove(nlobj,xk,mv,yref,[],nloptions); % Predict prediction model states for the next iteration predict(EKF,[mv; Ts]); % Implement first optimal control move x = pendulumDT0(x,mv,Ts); % Generate sensor data y = x([1 3]) + randn(2,1)*0.01; % Save plant states xHistory = [xHistory x]; end
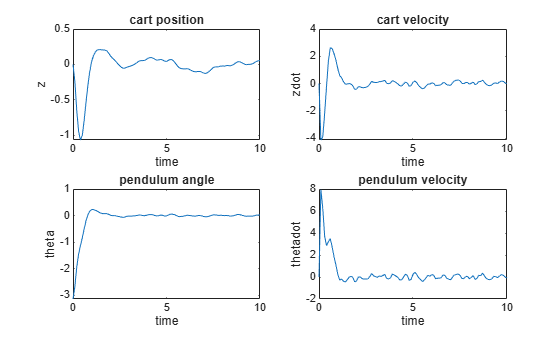
Plot the resulting state trajectories.
figure subplot(2,2,1) plot(0:Ts:Duration,xHistory(1,:)) xlabel('time') ylabel('z') title('cart position') subplot(2,2,2) plot(0:Ts:Duration,xHistory(2,:)) xlabel('time') ylabel('zdot') title('cart velocity') subplot(2,2,3) plot(0:Ts:Duration,xHistory(3,:)) xlabel('time') ylabel('theta') title('pendulum angle') subplot(2,2,4) plot(0:Ts:Duration,xHistory(4,:)) xlabel('time') ylabel('thetadot') title('pendulum velocity')
Version History
Introduced in R2018b
See Also
Functions
Objects
Blocks
Topics
- Trajectory Optimization and Control of Sliding Robot Using Nonlinear MPC
- Nonlinear Model Predictive Control of Exothermic Chemical Reactor
- Swing-Up Control of Pendulum Using Nonlinear Model Predictive Control
- Nonlinear and Gain-Scheduled MPC Control of an Ethylene Oxidation Plant
- Control Quadruple-Tank Using Passivity-Based Nonlinear MPC
- Plan and Execute Task- and Joint-Space Trajectories Using Kinova Gen3 Manipulator (Robotics System Toolbox)
- Nonlinear MPC
- What Is Model Predictive Control?