allanvar
Variance d'Allan
Syntaxe
Description
La variance d'Allan est utilisée pour mesurer la stabilité de fréquence des oscillations d'une séquence de données dans le domaine temporel. Elle peut également être utilisée pour déterminer le bruit intrinsèque d'un système en fonction du temps de moyennage. La série temporelle de moyenne τ peut être spécifiée comme τ = m/fs. Ici, fs est la fréquence d'échantillonnage des données, et m est une liste croissante de facteurs de moyenne (tels que 1, 2, 4, 8, …).
[ renvoie la variance d'Allan avar,tau] = allanvar(Omega)avar en fonction du temps moyen tau. Le temps de moyennage par défaut tau est une séquence d'octave donnée comme (1, 2, ..., 2floor{log2[(N-1)/2]}), où N est le nombre d'échantillons dans Omega. Si Omega est spécifié comme une matrice, allanvar opère sur les colonnes de omega.
Exemples
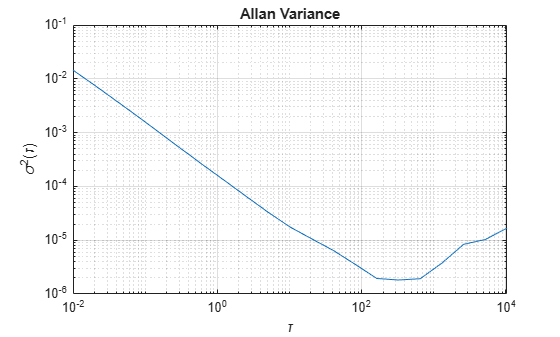
Chargez les données du gyroscope à partir d'un fichier MAT, y compris la fréquence d'échantillonnage des données en Hz. Calculez la variance d'Allan.
load('LoggedSingleAxisGyroscope','omega','Fs') [avar,tau] = allanvar(omega,'octave',Fs);
Représentez graphiquement la variance d'Allan sur un graphique loglog.
loglog(tau,avar) xlabel('\tau') ylabel('\sigma^2(\tau)') title('Allan Variance') grid on
Générez un bruit de gyroscope échantillonné, incluant une marche aléatoire angulaire et une marche aléatoire de vitesse.
numSamples = 1e6; Fs = 100; nStd = 1e-3; kStd = 1e-7; nNoise = nStd.*randn(numSamples,1); kNoise = kStd.*cumsum(randn(numSamples,1)); omega = nNoise+kNoise;
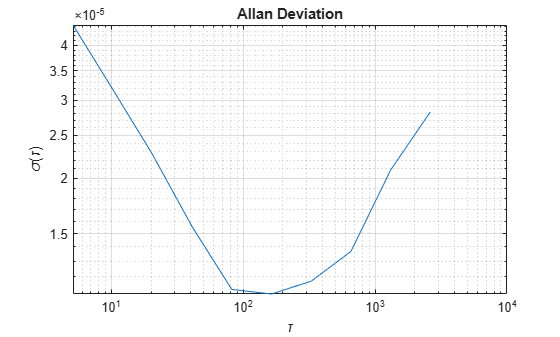
Calculez l'écart d'Allan pour des valeurs spécifiques de . L'écart d'Allan est la racine carrée de la variance d'Allan.
m = 2.^(9:18); [avar,tau] = allanvar(omega,m,Fs); adev = sqrt(avar);
Tracez la déviation d'Allan sur un graphique loglog.
loglog(tau,adev) xlabel('\tau') ylabel('\sigma(\tau)') title('Allan Deviation') grid on
Arguments d'entrée
Arguments de sortie
Historique des versions
Introduit dans R2019a