Modèles de capteurs
Effectuez la modélisation et la simulation des capteurs pour les accéléromètres, les magnétomètres, les gyroscopes, les altimètres, les GPS, les IMU et les capteurs de distance. Analysez les relevés des capteurs, le bruit des capteurs, les conditions environnementales et autres paramètres de configuration. Générez des trajectoires pour simuler le déplacement de ces capteurs dans un environnement réel et calibrez leurs performances.
Pour fusionner plusieurs capteurs ou utiliser d'autres algorithmes de localisation, voir .
Pour plus d'informations sur la localisation et le positionnement GNSS, voir Positionnement GNSS.
Fonctions
Blocs
Rubriques
- Introduction to Simulating IMU Measurements
This example shows how to simulate inertial measurement unit (IMU) measurements using the
imuSensorSystem object™. - Generate IMU Readings on a Double Pendulum
This example shows how to generate inertial measurement unit (IMU) readings from two IMU sensors mounted on the links of a double pendulum.
- Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS
- Inertial Sensor Noise Analysis Using Allan Variance
This example shows how to use the Allan variance to determine noise parameters of a MEMS gyroscope.
- Wheel Encoder Error Sources
Explore the various error sources of wheel encoders and how they affect the wheel odometry estimate.
- Remove Bias from Angular Velocity Measurement
This example shows how to remove gyroscope bias from an IMU using
imufilter. - Configure Time Scope MATLAB Object
Customize
timescopeproperties and use measurement tools. - Simulate Inertial Sensor Readings from a Driving Scenario
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
- Simulate INS Block
In this example, you simulate an INS block by using the pose information of a vehicle undertaking a left-turn trajectory.
Sélection d՚exemples
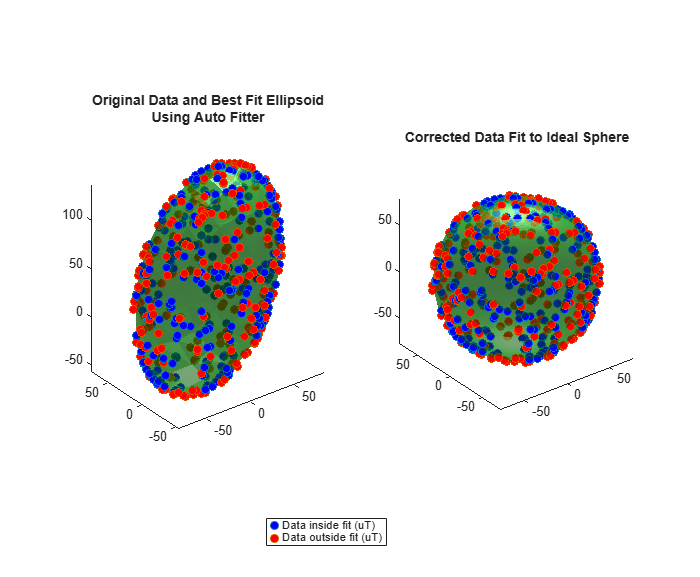
Magnetometer Calibration
Magnetometers detect magnetic field strength along a sensor's X,Y and Z axes. Accurate magnetic field measurements are essential for sensor fusion and the determination of heading and orientation.
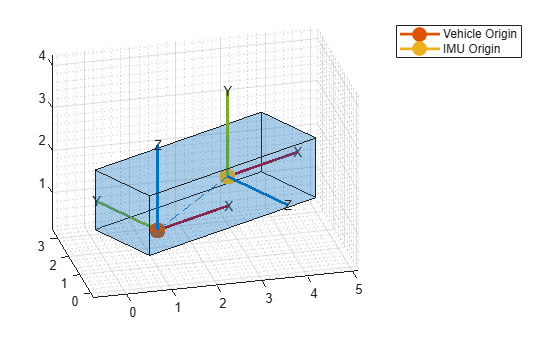
Generate Off-Centered IMU Readings
Generate inertial measurement unit (IMU) readings from a sensor that is mounted on a ground vehicle. Depending on the location of the sensor, the IMU accelerations are different.

Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit (IMU). Gesture recognition is a subfield of the general Human Activity Recognition (HAR) field. In this example, you use quaternion dynamic time warping and clustering to build a template matching algorithm to classify five gestures.
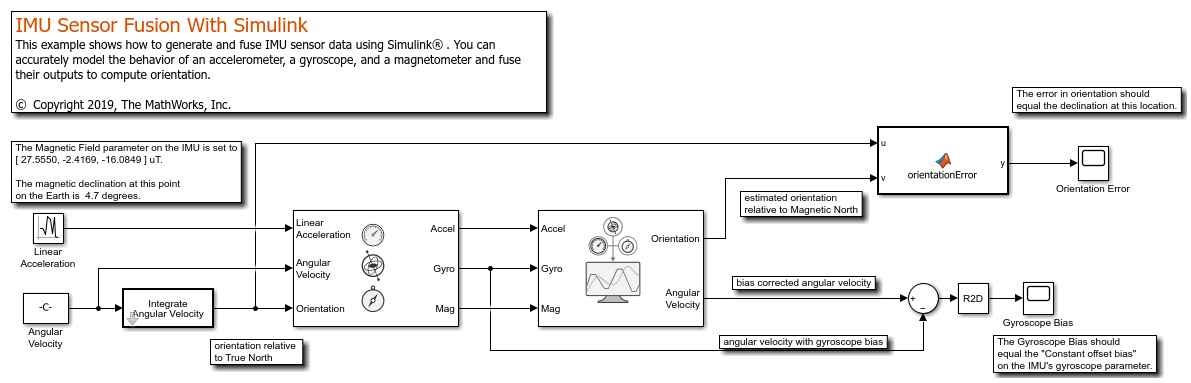
IMU Sensor Fusion with Simulink
Generate and fuse IMU sensor data using Simulink®. You can accurately model the behavior of an accelerometer, a gyroscope, and a magnetometer and fuse their outputs to compute orientation.