derivative
Description
stateDot = derivative(kinematicModel,state,cmds)stateDot, en tant que vecteur à trois éléments [xDot yDot thetaDot] pour un modèle de mouvement de véhicule cinématique de vélo, kinematicModel. xDot et yDot font référence à la vitesse du véhicule, spécifiée en mètres par seconde. thetaDot est la vitesse angulaire du cap du véhicule, spécifiée en radians par seconde.
Exemples
Créez un robot et définissez sa position de départ et son orientation initiales.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
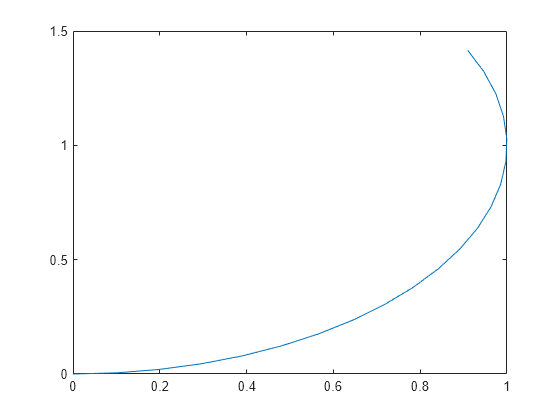
Réglez la durée de la simulation sur 1 s avec des pas de temps de 0,05 s et les commandes d'entrée sur 2 m/s pour la vitesse du véhicule et pi/4 rad pour l'angle de braquage afin de créer un virage à gauche. Simulez le mouvement du robot en utilisant le solveur ode45 sur la fonction derivative .
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Tracez le chemin.
figure plot(y(:,1),y(:,2))
Arguments d'entrée
Arguments de sortie
Références
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
Capacités étendues
Historique des versions
Introduit dans R2021b