bicycleKinematics
Description
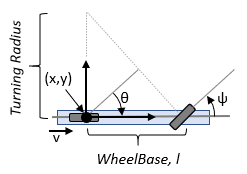
bicycleKinematics crée un modèle de véhicule à deux roues pour simuler la dynamique simplifiée d'un véhicule semblable à une voiture. Ce modèle représente un véhicule à deux essieux séparés par une distance, WheelBase. L'état du véhicule est défini comme un vecteur à trois éléments, [x y theta], de global. xy-position, spécifiée en mètres, et un angle de cap du véhicule, theta, spécifié en radians. La roue avant peut être tournée avec l'angle de braquage psi. Le cap du véhicule, theta, est défini au centre de l'essieu arrière. Pour calculer les états dérivés dans le temps du modèle, utilisez la fonction derivative avec les commandes d'entrée et l'état actuel du robot.
Création
Description
kinematicModel = bicycleKinematics
kinematicModel = bicycleKinematics(Name,Value)
Propriétés
Fonctions d'objet
derivative | Dérivée temporelle du modèle de véhicule vélo |
Exemples
Créez un robot et définissez sa position de départ et son orientation initiales.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
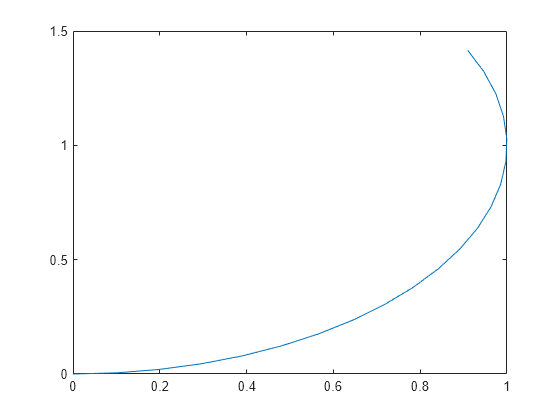
Réglez la durée de la simulation sur 1 s avec des pas de temps de 0,05 s et les commandes d'entrée sur 2 m/s pour la vitesse du véhicule et pi/4 rad pour l'angle de braquage afin de créer un virage à gauche. Simulez le mouvement du robot en utilisant le solveur ode45 sur la fonction derivative .
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Tracez le chemin.
figure plot(y(:,1),y(:,2))
Références
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
Capacités étendues
Historique des versions
Introduit dans R2021b
Voir aussi
Rubriques
- Mobile Robot Kinematics Equations (Robotics System Toolbox)