magparams
Paramètres du capteur du magnétomètre
Description
La classe magparams crée un objet de paramètres de capteur magnétomètre. Vous pouvez utiliser cet objet pour modéliser un magnétomètre lors de la simulation d'une IMU avec imuSensor. Voir la section Algorithms de imuSensor pour plus de détails sur la modélisation magparams .
Création
Description
params = magarams
params = magparams(Name,Value)magparams en utilisant un ou plusieurs arguments de paire Name,Value . Name est un nom de propriété et Value est la valeur correspondante. Name doit apparaître entre guillemets simples (''). Vous pouvez spécifier plusieurs arguments de paire nom-valeur dans n'importe quel ordre comme Name1,Value1,...,NameN,ValueN. Toutes les propriétés non spécifiées prennent des valeurs par défaut.
Propriétés
Exemples
Générez des données de magnétomètre pour un objet imuSensor à partir d'entrées fixes.
Générer un objet paramètre magnétomètre avec une lecture de capteur maximale de 1 200et une résolution de 0,1. Le biais de décalage constant est de 1. Le capteur a une densité spectrale de puissance de . Le biais dû à la température est [0,8 0,8 2,4]. L'erreur du facteur d'échelle liée à la température est de 0,1 %.
params = magparams('MeasurementRange',1200,'Resolution',0.1,'ConstantBias',1,'NoiseDensity',[0.6 0.6 0.9]/sqrt(100),'TemperatureBias',[0.8 0.8 2.4],'TemperatureScaleFactor',0.1);
Utilisez une fréquence d'échantillonnage de 100 Hz espacée de 1 000 échantillons. Créez l'objet imuSensor à l'aide de l'objet paramètre magnétomètre.
Fs = 100; numSamples = 1000; t = 0:1/Fs:(numSamples-1)/Fs; imu = imuSensor('accel-mag','SampleRate', Fs, 'Magnetometer', params);
Générez des données de magnétomètre à partir de l'objet imuSensor.
orient = quaternion.ones(numSamples, 1); acc = zeros(numSamples, 3); angvel = zeros(numSamples, 3); [~, magData] = imu(acc, angvel, orient);
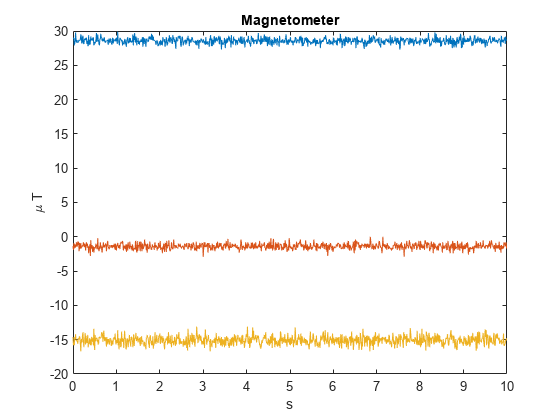
Tracez les données résultantes du magnétomètre.
plot(t, magData) title('Magnetometer') xlabel('s') ylabel('\mu T')
Capacités étendues
Historique des versions
Introduit dans R2018b