phased.MVDRBeamformer
Narrowband minimum-variance distortionless-response beamformer
Description
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR beamformer belongs to the family of constrained optimization beamformers.
To beamform signals arriving at an array:
Create the
phased.MVDRBeamformerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
beamformer = phased.MVDRBeamformerbeamformer, with default property values.
beamformer = phased.MVDRBeamformer(Name,Value)Name set to a specified
Value. You can specify additional name-value pair arguments in any
order as
(Name1,Value1,...,NameN,ValueN).
Enclose each property name in single quotes.
Example: beamformer =
phased.MVDRBeamformer('SensorArray',phased.URA,'OperatingFrequency',300e6)
sets the sensor array to a uniform rectangular array (URA) with default URA property
values. The beamformer has an operating frequency of 300 MHz.
Properties
Usage
Syntax
Description
Y = beamformer(X,XT)XT as training samples to calculate the beamforming weights. To
use this syntax, set the TrainingInputPort property to true.
Y = beamformer(X,ANG)ANG as the beamforming direction. To use this syntax, set the
DirectionSource property to 'Input port'.
Y = beamformer(X,XT,ANG)TrainingInputPort property to true and set the
DirectionSource property to 'Input port'.
[
returns the beamforming weights, Y,W] = beamformer(___)W. To use this syntax, set the
WeightsOutputPort property to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
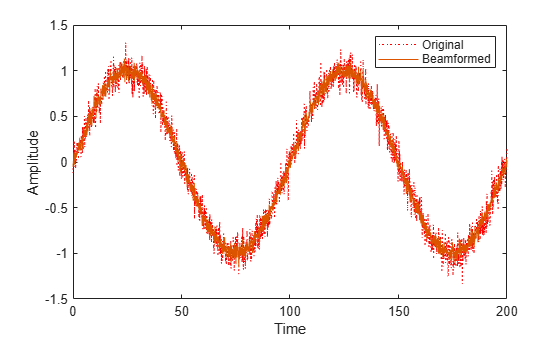
Apply an MVDR beamformer to a 5-element ULA. The incident angle of the signal is 45 degrees in azimuth and 0 degree in elevation. The signal frequency is .01 hertz. The carrier frequency is 300 MHz.
t = [0:.1:200]'; fr = .01; xm = sin(2*pi*fr*t); c = physconst('LightSpeed'); fc = 300e6; rng('default'); incidentAngle = [45;0]; array = phased.ULA('NumElements',5,'ElementSpacing',0.5); x = collectPlaneWave(array,xm,incidentAngle,fc,c); noise = 0.1*(randn(size(x)) + 1j*randn(size(x))); rx = x + noise;
Compute the beamforming weights.
beamformer = phased.MVDRBeamformer('SensorArray',array,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'Direction',incidentAngle,'WeightsOutputPort',true); [y,w] = beamformer(rx);
Plot the signals.
plot(t,real(rx(:,3)),'r:',t,real(y)) xlabel('Time') ylabel('Amplitude') legend('Original','Beamformed')
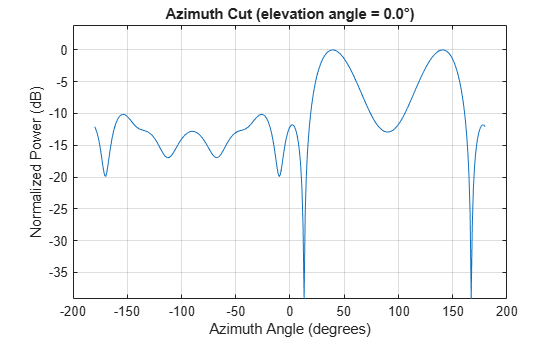
Plot the array response pattern using the MVDR weights.
pattern(array,fc,[-180:180],0,'PropagationSpeed',c,... 'Weights',w,'CoordinateSystem','rectangular',... 'Type','powerdb');
Algorithms
References
[1] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002.
[2] Frost, O. “An Algorithm For Linearly Constrained Adaptive Array Processing”, Proceedings of the IEEE. Vol. 60, Number 8, August, 1972, pp. 926–935.
Extended Capabilities
Version History
Introduced in R2011a