Setup for Connecting UR Series Manipulators over RTDE
With RTDE (Real-Time Data Exchange) functionality, the Robotics System Toolbox™ Support Package for Universal Robots UR Series Manipulators provides enhanced capabilities for connecting to and controlling Universal Robots cobots. RTDE provides a high-performance interface for exchanging data with the cobot in real time, enabling more efficient and reliable control schemes, particularly for applications that require precise synchronization between the robot and external systems.
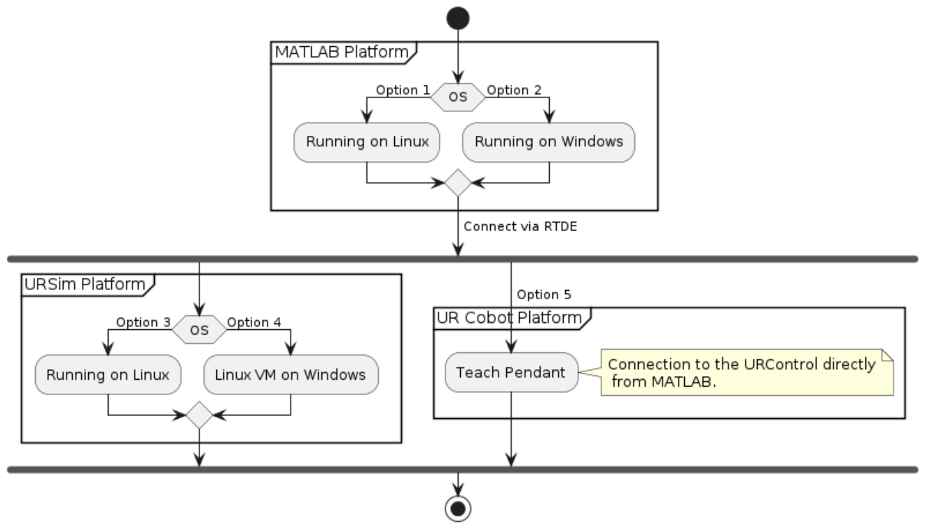
This image and the table show the options for RTDE-based workflow by connecting to either the URSim offline simulator or the hardware.
| Connection Option | Operating System with MATLAB® and the Support Package | UR Series Cobot or the Operating System with URSim Installed | Description |
|---|---|---|---|
| Connect to URSim (see Set Up URSim Offline Simulator for RTDE) | Linux® | URSim on Linux | Direct connection to URSim running on Linux |
| Windows® | URSim on Linux | Direct connection to URSim running on Linux | |
| Windows | URSim on Linux VM | Connection to URSim running on a Linux VM hosted on Windows | |
| Connect to UR Series cobot (see Set Up UR Series Cobot for RTDE) | Linux | UR Series cobot | Connection to the UR Series cobot's Teach Pendant directly from MATLAB |
| Windows | UR Series cobot | Connection to the UR Series cobot's Teach Pendant directly from MATLAB |
Topics
- Install Support for UR Series Hardware for RTDE
Install Robotics System Toolbox Support Package for Universal Robots UR Series Manipulators for RTDE.
- Set Up URSim Offline Simulator for RTDE
Setup instructions for the URSim simulator from Universal Robots for controlling cobot over RTDE protocol.
- Set Up UR Series Cobot for RTDE
Set up and enable remote control from MATLAB computer to UR Series cobot for communicating over RTDE.