Visualize Manipulator Trajectory Tracking with Simulink 3D
Simulate joint-space trajectories for a rigid body tree robot model and visualize the results with Simulation 3D Robot block in the Simulink 3D world.
Model Overview
Load the model with the following command:
open_system("SL3DJointSpaceManipulatorTrajectory")This example uses a Kinova Gen3 manipulator, which is stored in the model workspace. However, load and visualize the robot with the following commands:
gen3 = loadrobot("kinovaGen3","DataFormat","column");
The model is split into two sections:
Manipulator Trajectory Tracking
Visualization in Simulink 3D™
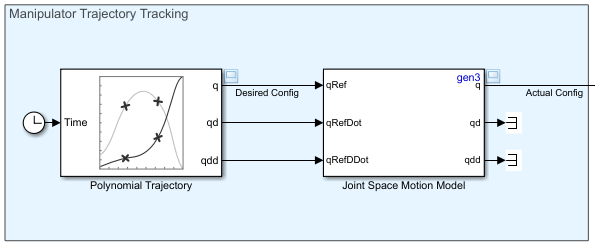
Manipulator Trajectory Tracking
The Polynomial Trajectory block generates continuous joint-space trajectories from random sets of waypoints in the range [-0.375*pi 0.375*pi], stopping at each of the waypoints. The Joint-Space Motion Model block simulates the closed-loop tracking of these trajectories for a Kinova Gen3 manipulator with computed-torque control.
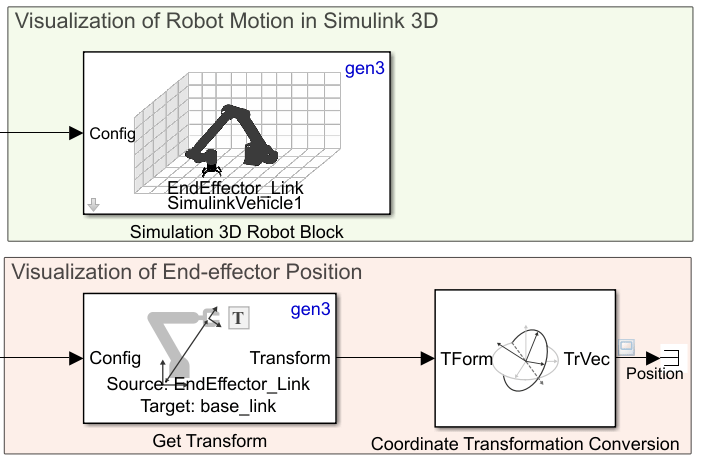
Visualization with Simulation 3D Robot block in Simulink 3D™
The Simulation 3D Robot block inserts the manipulator into the Simulink 3D world defined by the RigidBodyTree object input. The Get Transform block is used to get the position of the end effector, which is then converted from a homogeoneous transform matrix to a translation vector.
Simulate the Model
In the model, pacing is active, as indicated by the clock symbol below the run button:

This ensures that the model is slowed down to near real-time speed, so that the visualization can be updated at a realistic pace.
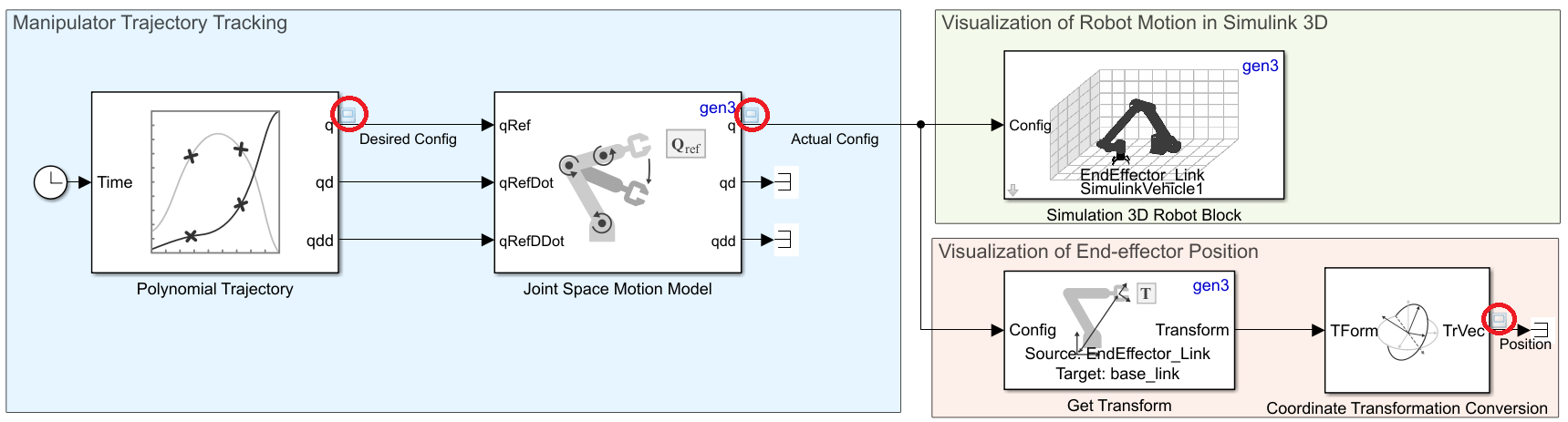
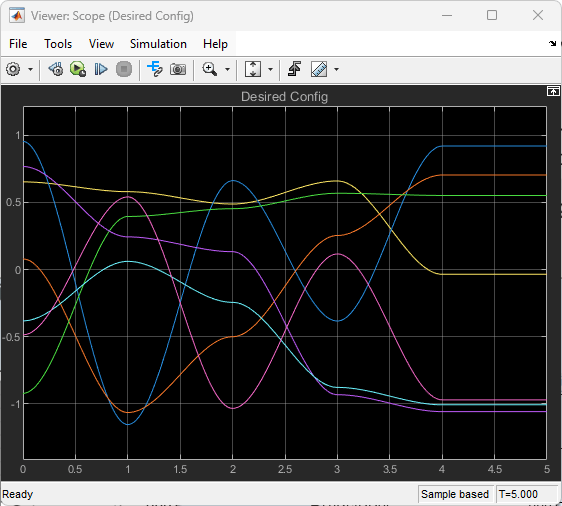
Trajectory Visualization
By default, the model opens the scopes that display velocity and position information. However, if they are closed, the scopes can be opened by double-clicking the associated viewer icons:
Visualize robot motion in Simulink 3D world.
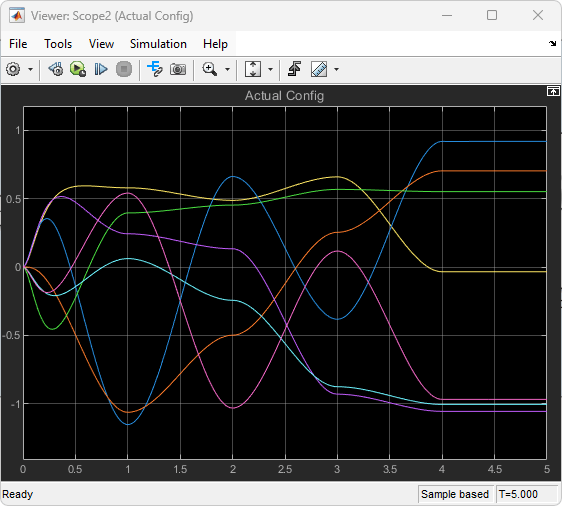
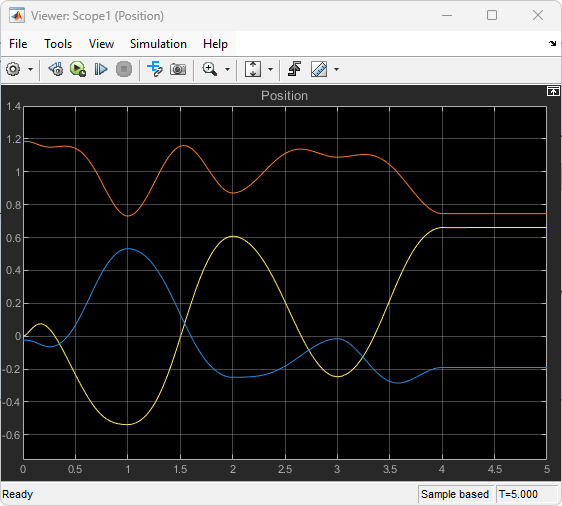
The scopes show the tracking results of the Joint Space Motion Model block. As can be seen on the left in the figures below, the initial configuration of the robot differs from the reference trajectories, but the controlled motion ensures that the trajectory is reached and tracked for the duration of the simulation. The final scope displays the X, Y, and Z position of the end effector in the world frame.
See Also
Simulation 3D Scene Configuration | Simulation 3D Robot