Control of a Spring-Mass-Damper System Using Mixed-Mu Synthesis
This example shows how to perform mixed-mu synthesis with the musyn command in the Robust Control Toolbox™. Here musyn is used to design a robust controller for a two mass-spring-damper system with uncertainty in the spring stiffness connecting the two masses. This example is taken from the paper "Robust mixed-mu synthesis performance for mass-spring system with stiffness uncertainty," D. Barros, S. Fekri and M. Athans, 2005 Mediterranean Control Conference.
Performance Specifications
Consider the mass-spring-damper system in Figure 1. Spring k2 and damper b2 are attached to the wall and mass m2. Mass m2 is also attached to mass m1 through spring k1 and damper b1. Mass 2 is affected by the disturbance force f2. The system is controlled via force f1 acting on mass m1.
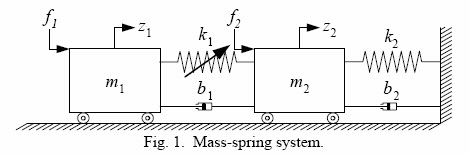
Our design goal is to use the control force f1 to attenuate the effect of the disturbance f2 on the position of mass m2. The force f1 does not directly act on mass m2, rather it acts through the spring stiffness k1. Hence any uncertainty in the spring stiffness k1 will make the control problem more difficult. The control problem is formulated as:
The controller measures the noisy displacement of mass
m2and applies the control forcef1. The sensor noise,Wn, is modeled as a constant 0.001.
The actuator command is penalized by a factor 0.1 at low frequency and a factor 10 at high frequency with a crossover frequency of 100 rad/s (filter
Wu).
The unit magnitude, first-order coloring filter,
Wdist, on the disturbance has a pole at 0.25 rad/s.
The performance objective is to attenuate the disturbance on mass
m2by a factor of 80 below 0.1 rad/s.
The nominal values of the system parameters are m1=1, m2=2, k2=1, b1=0.05, b2=0.05, and k1=2.
Wn = tf(0.001); Wu = 10*tf([1 10],[1 1000]); Wdist = tf(0.25,[1 0.25],'inputname','dist','outputname','f2'); Wp = 80*tf(0.1,[1 0.1]); m1 = 1; m2 = 2; k2 = 1; b1 = 0.05; b2 = 0.05;
Uncertainty Modeling
The value of spring stiffness k1 is uncertain. It has a nominal value of 2 and its value can vary between 1.2 and 2.8.
k1 = ureal('k1',2,'Range',[1.2 2.8]);
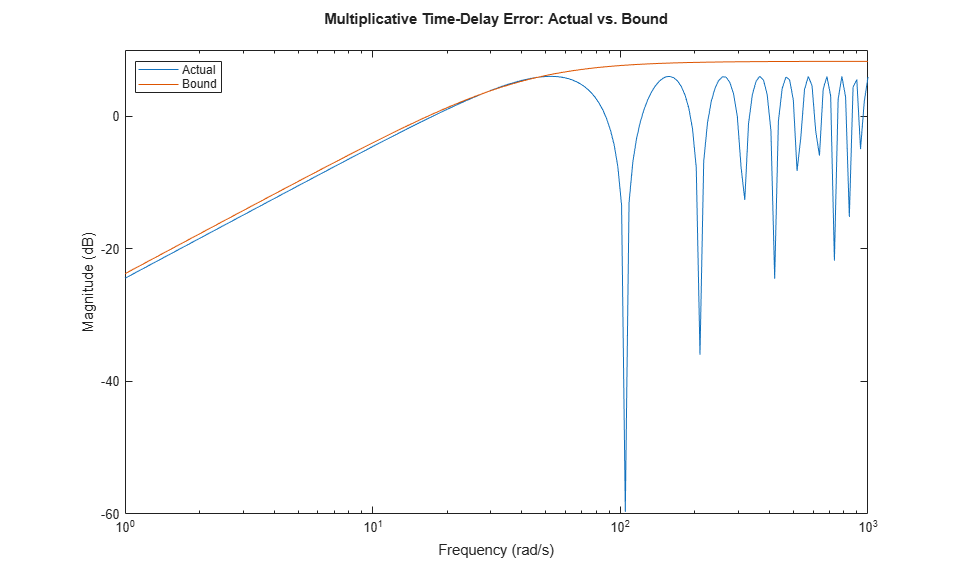
There is also a time delay tau between the commanded actuator force f1 and its application to mass m1. The maximum delay is 0.06 seconds. Neglecting this time delay introduces a multiplicative error of exp(-s*tau)-1. This error can be treated as unmodeled dynamics bounded in magnitude by the high-pass filter Wunmod = 2.6*s/(s + 40):
tau = ss(1,'InputDelay',0.06); Wunmod = 2.6*tf([1 0],[1 40]); bodemag(tau-1,Wunmod,logspace(0,3,200)); title('Multiplicative Time-Delay Error: Actual vs. Bound') legend('Actual','Bound','Location','NorthWest')
Construct an uncertain state-space model of the plant with the control force f1 and disturbance f2 as inputs.
a1c = [0 0 -1/m1 1/m2]'*k1;
a2c = [0 0 1/m1 -1/m2]'*k1 + [0 0 0 -k2/m2]';
a3c = [1 0 -b1/m1 b1/m2]';
a4c = [0 1 b1/m1 -(b1+b2)/m2]';
A = [a1c a2c a3c a4c];
plant = ss(A,[0 0;0 0;1/m1 0;0 1/m2],[0 1 0 0],[0 0]);
plant.StateName = {'z1';'z2';'z1dot';'z2dot'};
plant.OutputName = {'z2'};
Add the unmodeled delay dynamics at the first plant input.
Delta = ultidyn('Delta',[1 1]); plant = plant * append(1+Delta*Wunmod,1); plant.InputName = {'f1','f2'};
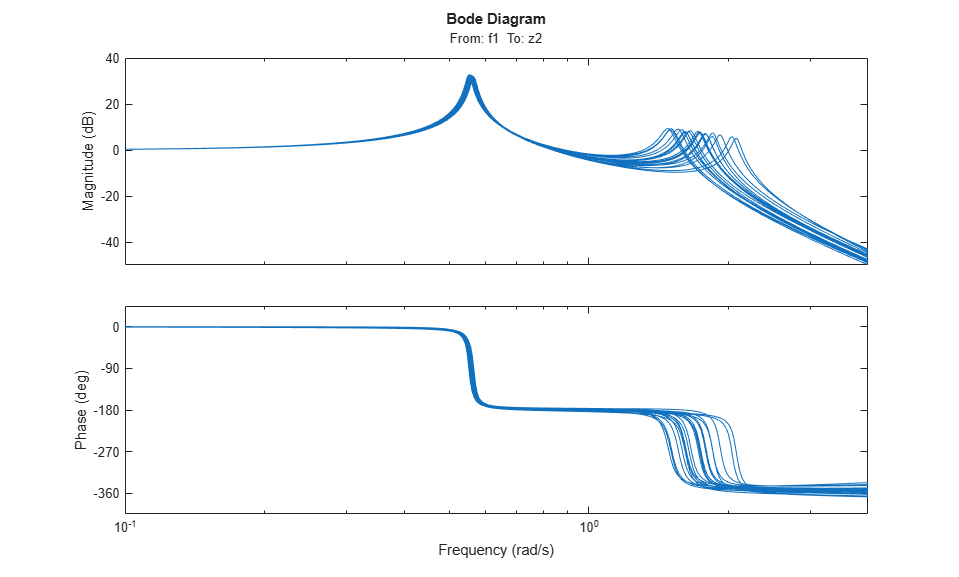
Plot the Bode response from f1 to z2 for 20 sample values of the uncertainty. The uncertainty on the value of k1 causes fluctuations in the natural frequencies of the plant modes.
bode(plant(1,1),{0.1,4})
Control Design
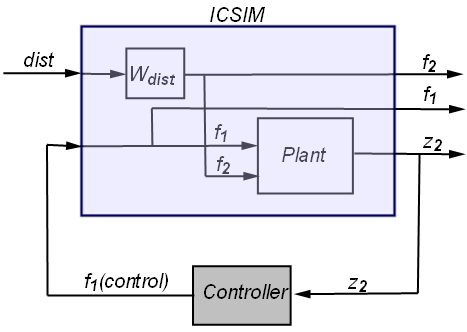
We use the following structure for controller synthesis:
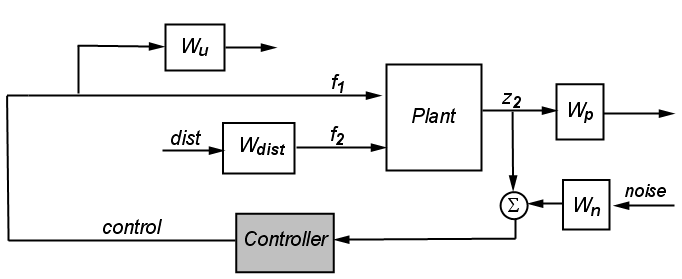
Figure 2
Use connect to construct the corresponding open-loop interconnection IC. Note that IC is an uncertain model with uncertain variables k1 and Delta.
Wu.u = 'f1'; Wu.y = 'Wu'; Wp.u = 'z2'; Wp.y = 'Wp'; Wn.u = 'noise'; Wn.y = 'Wn'; S = sumblk('z2n = z2 + Wn'); IC = connect(plant,Wdist,Wu,Wp,Wn,S,{'dist','noise','f1'},{'Wp','Wu','z2n'})
Uncertain continuous-time state-space model with 3 outputs, 3 inputs, 8 states. The model uncertainty consists of the following blocks: Delta: Uncertain 1x1 LTI, peak gain = 1, 1 occurrences k1: Uncertain real, nominal = 2, range = [1.2,2.8], 1 occurrences Type "IC.NominalValue" to see the nominal value and "IC.Uncertainty" to interact with the uncertain elements.
Complex mu-Synthesis
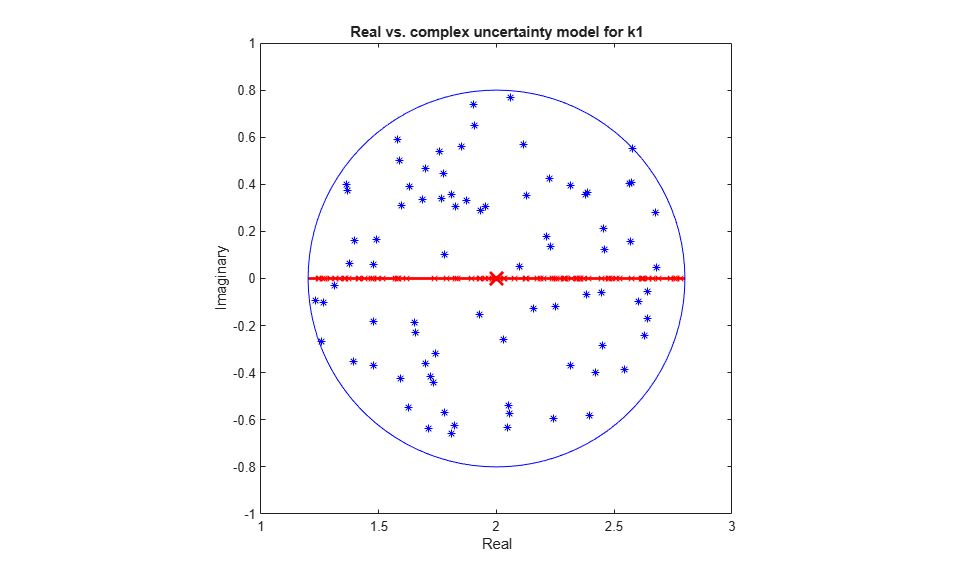
You can use the command musyn to synthesize a robust controller for the open-loop interconnection IC. By default, musyn treats all uncertain real parameters, in this example k1, as complex uncertainty. Recall that k1 is a real parameter with a nominal value of 2 and a range between 1.2 and 2.8. In complex mu-synthesis, it is replaced by a complex uncertain parameter varying in a disk centered at 2 and with radius 0.8. The plot below compares the range of k1 values when k1 is treated as real (red x) vs. complex (blue *).
k1c = ucomplex('k1c',2,'Radius',0.8); % complex approximation % Plot 80 samples of the real and complex parameters k1samp = usample(k1,80); k1csamp = usample(k1c,80); plot(k1samp(:),0*k1samp(:),'rx',real(k1csamp(:)),imag(k1csamp(:)),'b*') hold on % Draw value ranges for real and complex k1 plot(k1.Nominal,0,'rx',[1.2 2.8],[0 0],'r-','MarkerSize',14,'LineWidth',2) the=0:0.02*pi:2*pi; z=sin(the)+sqrt(-1)*cos(the); plot(real(0.8*z+2),imag(0.8*z),'b') hold off % Plot formatting axis([1 3 -1 1]), axis square ylabel('Imaginary'), xlabel('Real') title('Real vs. complex uncertainty model for k1')
Synthesize a robust controller Kc using complex mu-synthesis (treating k1 as a complex parameter).
[Kc,mu_c,infoc] = musyn(IC,1,1);
D-K ITERATION SUMMARY:
-----------------------------------------------------------------
Robust performance Fit order
-----------------------------------------------------------------
Iter K Step Peak MU D Fit D
1 2.954 2.452 2.483 16
2 1.145 1.143 1.153 18
3 1.086 1.085 1.09 18
4 1.082 1.081 1.083 18
5 1.085 1.085 1.086 18
Best achieved robust performance: 1.08
Note that mu_c exceeds 1 so the controller Kc fails to robustly achieve the desired performance level.
Mixed-Mu Synthesis
Mixed-mu synthesis accounts for uncertain real parameters directly in the synthesis process. Enable mixed-mu synthesis by setting the MixedMU option to 'on'.
opt = musynOptions('MixedMU','on'); [Km,mu_m] = musyn(IC,1,1,opt);
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 2.954 2.081 2.367 16 8
2 1.606 1.388 1.516 14 12
3 0.9338 1.077 1.248 16 8
4 0.916 0.997 1.111 16 8
5 0.9256 0.9501 1.039 20 8
6 0.9164 0.9315 0.9486 20 8
7 0.9119 0.9233 0.9268 18 8
8 0.9009 0.9113 0.9283 20 8
9 0.8977 0.9077 0.9196 20 8
10 0.9008 0.9064 0.9223 20 8
Best achieved robust performance: 0.906
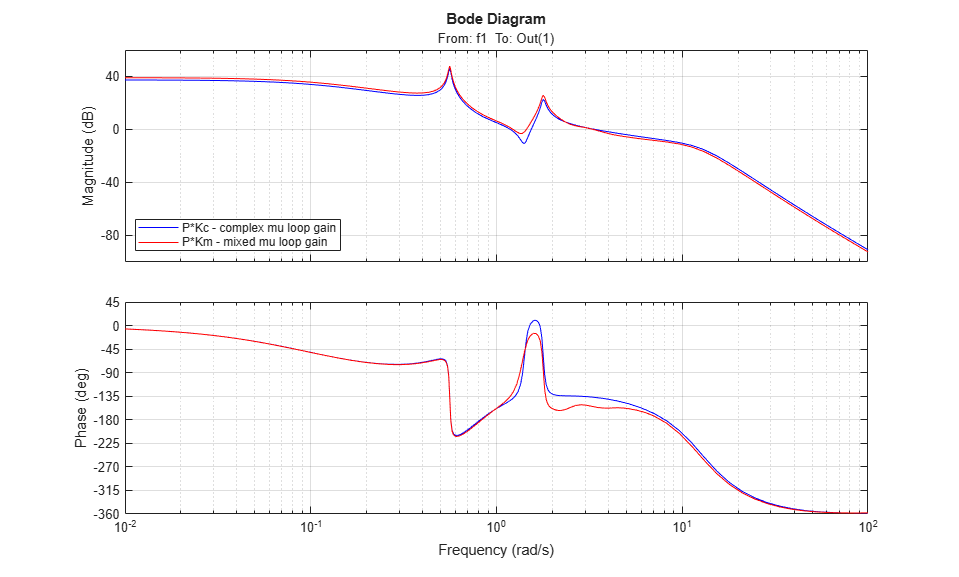
Mixed-mu synthesis is able to find a controller that achieves the desired performance and robustness objectives. A comparison of the open-loop responses shows that the mixed-mu controller Km gives less phase margin near 3 rad/s because it only needs to guard against real variations of k1.
clf % Note: Negative sign because interconnection in Fig 2 uses positive feedback bode(-Kc*plant.NominalValue(1,1),'b',-Km*plant.NominalValue(1,1),'r',{1e-2,1e2}) grid legend('P*Kc - complex mu loop gain','P*Km - mixed mu loop gain','location','SouthWest')
Worst-Case Analysis
A comparison of the two controllers indicates that taking advantage of the "realness" of k1 results in a better performing, more robust controller.
To assess the worst-case closed-loop performance of Kc and Km, form the closed-loop interconnection of Figure 2 and use the command wcgain to determine how large the disturbance-to-error norm can get for the specified plant uncertainty.
clpKc = lft(IC,Kc); clpKm = lft(IC,Km); [maxgainKc,badpertKc] = wcgain(clpKc); maxgainKc
maxgainKc =
struct with fields:
LowerBound: 2.0816
UpperBound: 2.0859
CriticalFrequency: 1.4302
[maxgainKm,badpertKm] = wcgain(clpKm); maxgainKm
maxgainKm =
struct with fields:
LowerBound: 0.8993
UpperBound: 0.9011
CriticalFrequency: 0.1480
The mixed-mu controller Km has a worst-case gain of 0.88 while the complex-mu controller Kc has a worst-case gain of 2.2, or 2.5 times larger.
Disturbance Rejection Simulations
To compare the disturbance rejection performance of Kc and Km, first build closed-loop models of the transfer from input disturbance dist to f2, f1, and z2 (position of the mass m2).
Km.u = 'z2'; Km.y = 'f1'; clsimKm = connect(plant,Wdist,Km,'dist',{'f2','f1','z2'}); Kc.u = 'z2'; Kc.y = 'f1'; clsimKc = connect(plant,Wdist,Kc,'dist',{'f2','f1','z2'});
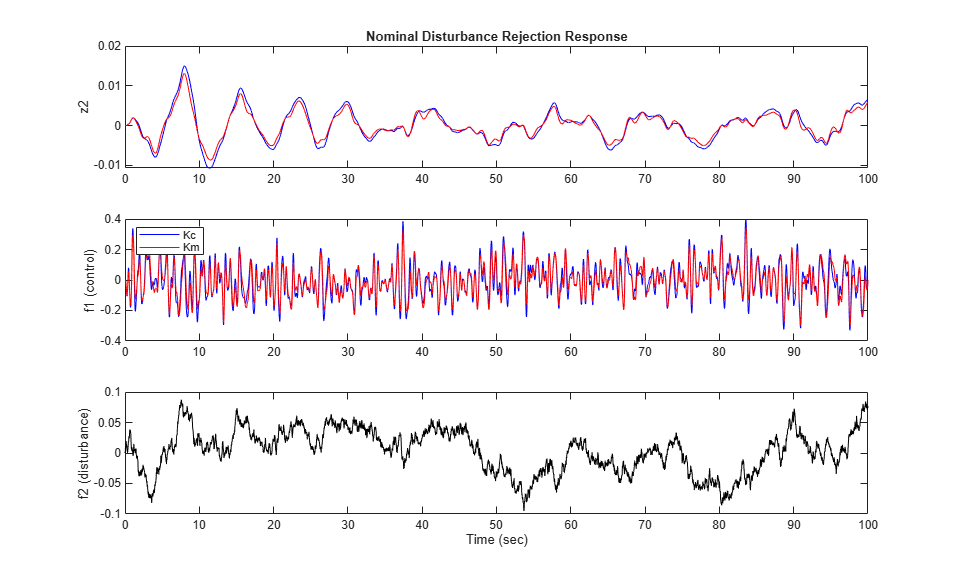
Inject white noise into the low-pass filter Wdist to simulate the input disturbance f2. The nominal closed-loop performance of the two designs is nearly identical.
t = 0:.01:100; dist = randn(size(t)); yKc = lsim(clsimKc.Nominal,dist,t); yKm = lsim(clsimKm.Nominal,dist,t); % Plot subplot(311) plot(t,yKc(:,3),'b',t,yKm(:,3),'r') title('Nominal Disturbance Rejection Response') ylabel('z2') subplot(312) plot(t,yKc(:,2),'b',t,yKm(:,2),'r') ylabel('f1 (control)') legend('Kc','Km','Location','NorthWest') subplot(313) plot(t,yKc(:,1),'k') ylabel('f2 (disturbance)') xlabel('Time (sec)')
Next, compare the worst-case scenarios for Kc and Km by setting the plant uncertainty to the worst-case values computed with wcgain.
clsimKc_wc = usubs(clsimKc,badpertKc); clsimKm_wc = usubs(clsimKm,badpertKm); yKc_wc = lsim(clsimKc_wc,dist,t); yKm_wc = lsim(clsimKm_wc,dist,t); subplot(211) plot(t,yKc_wc(:,3),'b',t,yKm_wc(:,3),'r') title('Worse-Case Disturbance Rejection Response') ylabel('z2') subplot(212) plot(t,yKc_wc(:,2),'b',t,yKm_wc(:,2),'r') ylabel('f1 (control)') legend('Kc','Km','Location','NorthWest')
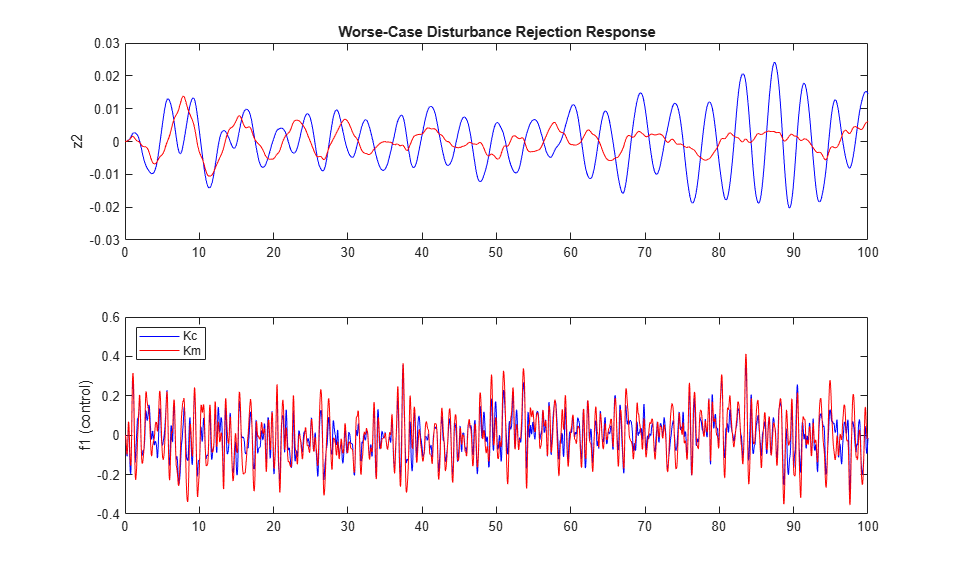
This shows that the mixed-mu controller Km significantly outperforms Kc in the worst-case scenario. By exploiting the fact that k1 is real, the mixed-mu controller is able to deliver better performance at equal robustness.
Controller Simplification
The mixed-mu controller Km has relatively high order compared to the plant. To obtain a simpler controller, use musyn's fixed-order tuning capability. This uses hinfstruct instead of hinfsyn for the synthesis step. You can try different orders to find the simplest controller that maintains robust performance. For example, try tuning a fifth-order controller. Use the "RandomStart" option to run several mu-synthesis cycles, each starting from a different initial value of K.
K = tunableSS('K',5,1,1); % 5th-order tunable state-space model opt = musynOptions('MixedMU','on','MaxIter',20,'RandomStart',2); rng(0), [CL,mu_f] = musyn(lft(IC,K),opt);
=== Synthesis 1 of 3 ============================================
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 3.147 3.045 3.045 16 8
2 2.392 2 2.024 20 8
3 1.509 1.504 1.906 14 8
4 1.195 1.191 1.299 16 8
5 1.041 1.041 1.15 20 8
6 1.041 1.041 1.042 18 8
7 1.022 1.022 1.075 16 8
8 1.032 1.032 1.057 18 8
9 1.023 1.023 1.034 20 8
Best achieved robust performance: 1.02
=== Synthesis 2 of 3 ============================================
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 3.161 3.059 3.059 16 8
2 2.247 2.106 2.124 18 8
3 1.748 1.691 1.699 20 8
4 1.122 1.119 1.343 16 8
5 1.042 1.042 1.075 20 8
6 1.023 1.023 1.125 20 8
7 1.048 1.048 1.143 16 8
8 1.053 1.053 1.066 18 8
Best achieved robust performance: 1.02
=== Synthesis 3 of 3 ============================================
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 3.559 3.444 3.445 14 8
2 2.061 2.115 2.37 20 8
3 1.556 1.556 1.731 14 8
4 1.156 1.243 1.713 18 8
5 1.121 1.12 1.207 20 8
6 1.082 1.081 1.162 20 8
7 1.043 1.042 1.123 18 8
8 1.058 1.056 1.065 20 8
9 1.04 1.039 1.092 18 8
Best achieved robust performance: 1.04
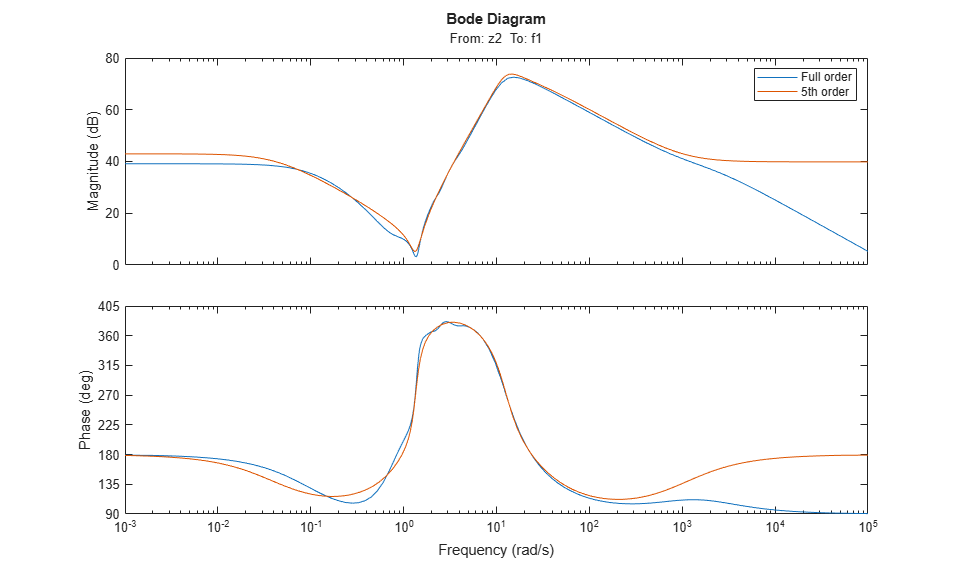
The best controller nearly delivers the desired robust performance (robust performance mu_f is close to 1). Compare the two controllers.
clf, bode(Km,getBlockValue(CL,'K')) legend('Full order','5th order')