Header Assignment
Update fields of ROS message header
Libraries:
ROS Toolbox /
ROS
Description
The Header Assignment block updates the values in the header field of a ROS
message. When a ROS message contains a header field of type
std_msgs/Header, you can use this block to update the
frame_id and stamp values in its header field. During
each sample hit, the block updates the frame_id and
stamp fields in the header. The accuracy of the timestamp depends on the
step size of the solver. Smaller step sizes result in more accurate timestamps.
Examples

Update Header Field of a ROS Message in Simulink
Update the header field of a ROS message using Simulink®.
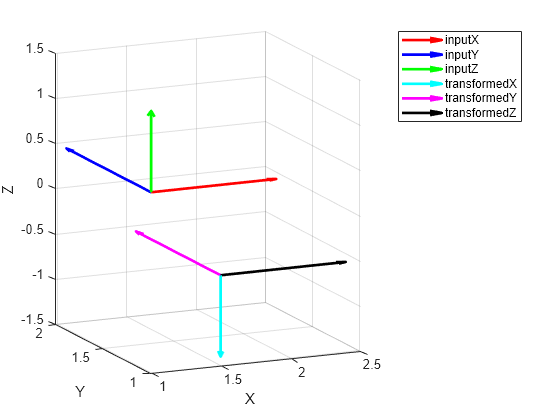
Read and Apply Transformation to ROS Message in Simulink
Read transformations from a ROS network and use them to transform a pose message using Simulink®.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2021a