Install and Set Up Docker for ROS, ROS 2, and Gazebo
This page provides installation instructions for Docker and guides you through building a Docker image from the Dockerfile included in the Docker and Support Files for ROS Toolbox repository, which is provided as a supplement to ROS Toolbox. The Docker image comes preinstalled with Gazebo and ROS, enabling MATLAB® and Simulink® to seamlessly integrate with the Gazebo robot simulator and an external ROS (Robot Operating System). Once you build the Docker image following the given instructions in this page, you can create instances of Docker container to run the relevant examples in ROS Toolbox.
Built on Ubuntu® 24.04 Noble, this Docker image works on multiple platforms, including Windows®, Linux®, and Mac.
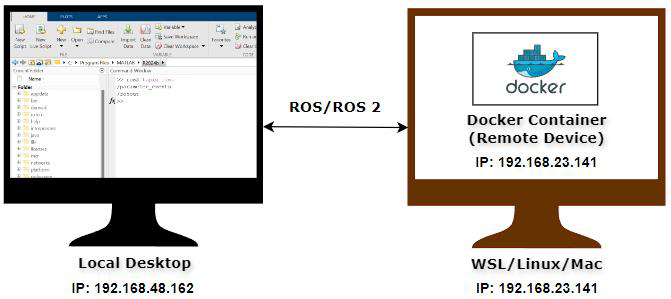
This graphic image below is a sample demonstration of connectivity between local host machine and remote device running the Docker container.
Prerequisites
This requires MATLAB R2025a or higher.
Dockerfiles Shipped with ROS Toolbox
The ROS Toolbox provides three Dockerfiles for ROS 2 listed in this table below.
| Name | Path | Content |
|---|---|---|
| base | ros_jazzy/Ubuntu/base | ROS 2 Jazzy desktop installation |
| gazebo | ros_jazzy/Ubuntu/gazebo |
|
| PX4 | ros_jazzy/Ubuntu/px4_gazebo |
|
Select the 'base' image for running ROS 2 examples that involve only code generation. Use the 'gazebo' image for examples requiring a Gazebo world, and choose the 'PX4' image for examples that involve both PX4® and Gazebo.
Additionally, the ROS Toolbox provides two Dockerfiles for ROS listed below.
| Name | Path | Content |
|---|---|---|
| ubuntu | ros_jazzy/Ubuntu |
|
| debian | ros_jazzy/Debian |
Instructions for Platform-Based Docker Installation
Setup Instructions post Docker Installation
![]() Set Up Docker Shipped with ROS Toolbox
Set Up Docker Shipped with ROS Toolbox

![]() Set Up Externally Sourced Docker
Set Up Externally Sourced Docker
Run Docker Container
Note
This step is NOT relevant for running ROS Toolbox examples.
Run this command to set up Docker and test its deployment. It supports remote code generation workflow.
docker run -it --net=host --name <container-name> <image-name>
The preconfigured Docker shipped with ROS Toolbox also comes with the capability of displaying GUI applications. You can see the following instructions to display the GUI applications using VNX or Xserver.