Ideal Rotational Motion Sensor
Capteur de mouvement dans les systèmes mécaniques de rotation

Bibliothèques :
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
Description
Le bloc Ideal Rotational Motion Sensor représente un capteur de mouvement mécanique de rotation idéal, c’est-à-dire un dispositif qui convertit une variable Across mesurée entre deux nœuds mécaniques de rotation en un signal de contrôle proportionnel à l’accélération, à la vitesse angulaire ou à la position (angle). Il est possible de spécifier la position angulaire initiale (décalage) sous forme de paramètre de bloc.
Le capteur est idéal puisqu’il ne tient pas compte de l’inertie, du frottement, des retards, de la consommation énergétique, etc.
Les connexions R et C sont des ports conservatifs de mécanique de rotation qui connectent le bloc aux nœuds où le mouvement est surveillé. Le sens positif du bloc va du port R au port C. Par conséquent, la vitesse est mesurée par l’équation ω = ωR – ωC, où ωR et ωC sont respectivement les vitesses angulaires absolues aux ports R et C. Le paramètre Measurement reference permet de désactiver le port C et d’effectuer les mesures par rapport à la terre.
Les connexions α, W et A sont respectivement les ports de sortie des signaux physiques de l’accélération, de la vitesse et du déplacement angulaires. Les paramètres de bloc permettent de contrôler la visibilité de ces ports. Si vous activez le port α, le bloc effectue des calculs supplémentaires pour mesurer l’accélération en fonction de la vitesse. Pour éviter que le modèle soit inutilement complexe, il est recommandé d’activer uniquement les ports effectivement utilisés pour les mesures dans chaque instance du bloc.
La case Wrap angle to [0, 2*pi] permet de contrôler la plage de sortie du déplacement angulaire. Lorsqu’elle est cochée, le déplacement angulaire reste dans la plage de 0 à 2π radians (360 degrés), quels que soient le nombre de révolutions effectuées par l’objet et le sens de rotation. Lorsqu’elle est décochée, la plage de sortie est illimitée.
La figure illustre la différence entre ces deux options.

Dans cet exemple, l’objet se déplace à une vitesse de 6 rad/s dans le sens positif pendant les 5 premières secondes, puis il repart dans le sens négatif à la même vitesse. La sortie du déplacement angulaire par défaut (ligne 1) indique que l’objet a avancé en tournant de 30 rad, puis est reparti dans le sens négatif en tournant jusqu’à –20 rad. Si vous cochez la case Wrap angle to [0, 2*pi], la sortie (ligne 2) reste dans la plage de 0 à 2π rad.
Cocher la case Wrap angle to [0, 2*pi] permet de simplifier le développement de modèles où la relation entre les paramètres et l’angle de rotation est complexe, par exemple les pompes et les moteurs.
Exemples

Moteur DC à aimants permanents
Cet exemple montre comment vérifier les spécifications du fabricant relatives à la vitesse à vide, au courant à vide et au couple de décrochage d’un moteur DC à l’aide d’un harnais de test et de blocs Simscape™.
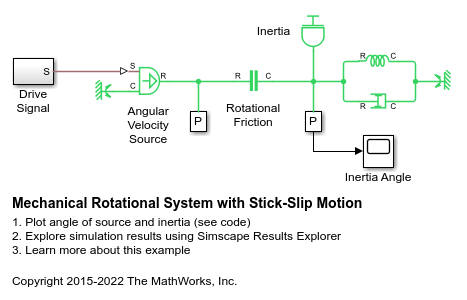
Système mécanique de rotation avec mouvement saccadé
Ce modèle présente un système mécanique de rotation avec frottement saccadé (stick-slip). Une inertie est connectée à un point fixe par un ressort et un amortisseur. Elle est commandée par une source de vitesse via un élément de frottement saccadé. Cet élément présente une différence entre les frottements de décollement et de Coulomb, ce qui provoque le mouvement saccadé de l’inertie.