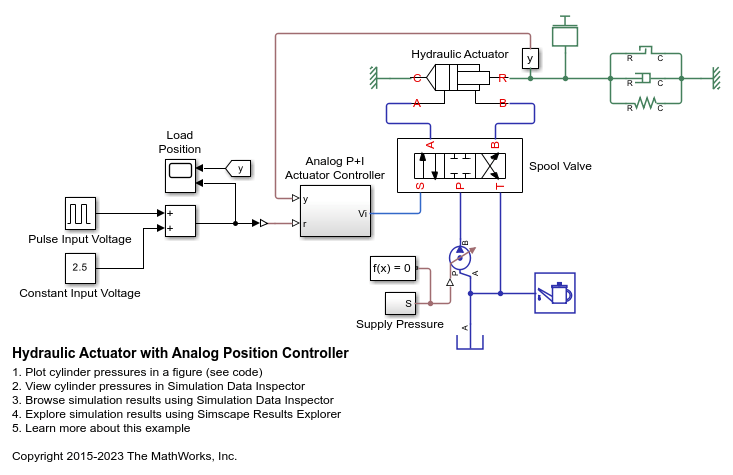
Hydraulic Actuator with Analog Position Controller
This example shows how the Foundation library can be used to model systems that span electrical, mechanical and isothermal liquid domains. In the model, a hydraulic system implemented in the isothermal liquid domain controls the mechanical load position in response to a voltage reference demand. If the reference demand is zero, then the hydraulic actuator (and load) displacement is zero, and if the reference is +5 volts, then the displacement is 100 mm.
The proportional plus integral controller is implemented using op-amps, the final stage of which is set up as a current source. This then drives a torque motor with resistance and inductance terms modeled. The torque motor directly actuates the spool valve, which in turn controls the main hydraulic circuit supplying the hydraulic ram. Finally, the ram drives a generic mechanical load.
A model with this level of fidelity is ideal to support the servo-valve controller design and testing. It includes the electromechanical high frequency modes that affect stability margins, as well as nonlinear flow rate effects when large demands are made from the hydraulics.
Model
Actuator Control Circuit Subsystem

Spool Valve Subsystem

Motor Control Circuit Subsystem

Simulation Results from Scopes

Simulation Results from Simscape Logging
The figure below shows the cylinder pressures and load position plotted in a MATLAB figure. You can also view the data in the Simscape Results Explorer and the Simulation Data Inspector.
