First-Order Hold (Obsolete)
Implement first-order sample-and-hold
Description
Note
First-Order Hold is not recommended for continuous to discrete signal conversion. Use Zero-Order Hold instead.
The First-Order Hold block implements a first-order sample-and-hold that operates at the specified sampling interval.
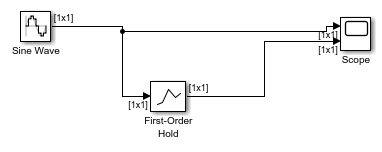
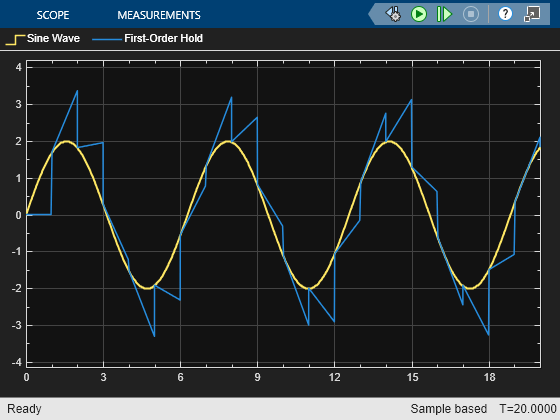
This figure compares the output from a Sine Wave block and a First-Order Hold block.

Examples
This example shows how to perform a first-order sample-and-hold of a sine wave signal using the First-Order Hold block.
Ports
Input
Output
Parameters
Version History
Introduced before R2006a