Cette page s'applique à la version précédente. La page correspondante en anglais a été supprimée de la version actuelle.
Contrôle de vol longitudinal d’un avion
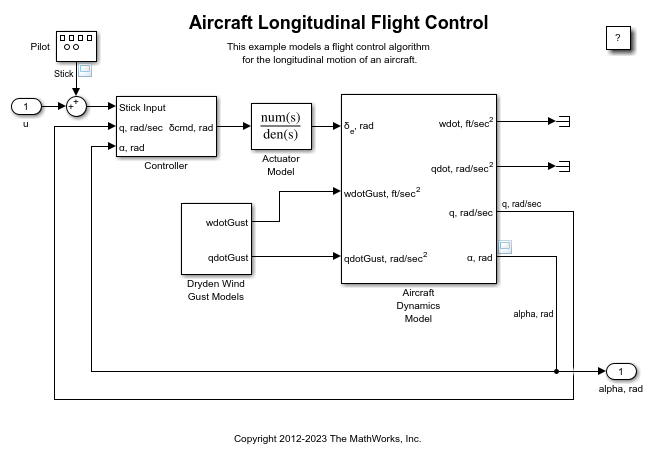
Cet exemple montre comment modéliser le contrôle de vol pour le mouvement longitudinal d’un avion. Les approximations linéaires de premier ordre du comportement de l’avion et de l’actionneur sont reliées à un design analogique du contrôle de vol. Le sous-système Controller analogique :
Utilise la commande de tangage du manche de contrôle comme Set Point pour l’angle de tangage de l’avion
Utilise l’angle de tangage et la vitesse de tangage de l’avion pour déterminer les commandes du contrôleur
Pour perturber le système, le modèle implémente une version simplifiée du sous-système Dryden Wind Gust Models.
open_system('slexAircraftExample')
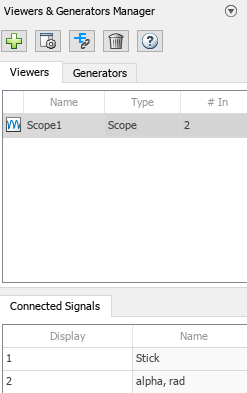
Pour instrumenter votre modèle sans ajouter de blocs, envisagez d’utiliser la fonction Viewers and Generators Manager. Pour ouvrir le gestionnaire, dans l’onglet Simulation, puis, dans la section Prepare, sélectionnez Viewers Manager. Dans cet exemple, Viewer and Generators Manager est configuré pour enregistrer deux signaux (Stick et alpha) dans le bloc Scope nommé Scope1.
Le fichier slexAircraftData.m stocke les paramètres du modèle. Le modèle charge slexAircraftData.m dans l’espace de travail du modèle. Pour afficher et modifier les données de l’espace de travail du modèle, utilisez Model Explorer. Pour ouvrir Model Explorer, dans la section Design de l’onglet Modeling, sélectionnez Model Explorer.
Pour exécuter la simulation, cliquez sur Run. Le bloc Scope1 affiche les signaux Stick et alpha.
evalc('sim(''slexAircraftExample'')');
Voir aussi
Rubriques
- Create Aerospace Models (Aerospace Blockset)
- Model Explorer
- Model Discretizer
- Viewers and Generators Manager