La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Applications aérospatiales
Simulink permet de modéliser et simuler de nombreux systèmes aérospatiaux. Ces exemples de modèles illustrent les applications aérospatiales.
Lors de la modélisation de systèmes aérospatiaux dans l'environnement Simulink, vous pouvez envisager d'utiliser Aerospace Blockset. Aerospace Blockset vient compléter Simulink pour permettre de modéliser, de simuler et d'analyser la dynamique des véhicules aérospatiaux. Il est possible d'intégrer la dynamique d'un véhicule, de valider des modèles de l'environnement de vol et de modéliser le comportement du pilote puis de connecter le modèle au simulateur de vol FlightGear pour visualiser les résultats de la simulation.
Rubriques
- Create Aerospace Models (Aerospace Blockset)
Build models with your Aerospace Blockset software.
- Fundamental Coordinate System Concepts (Aerospace Blockset)
Define coordinate systems when working with the Aerospace Blockset software.
- Projects Template for Flight Simulation Applications (Aerospace Blockset)
Use projects to help organize large flight simulation modeling projects and make it easier to share projects with others.
Informations connexes
Sélection d՚exemples

Developing the Apollo Lunar Module Digital Autopilot
"Working on the design of the Lunar Module digital autopilot was the highlight of my career as an engineer. When Neil Armstrong stepped off the LM (Lunar Module) onto the moon's surface, every engineer who contributed to the Apollo program felt a sense of pride and accomplishment. We had succeeded in our goal. We had developed technology that never existed before, and through hard work and meticulous attention to detail, we had created a system that worked flawlessly." -Richard J. Gran, The Apollo 11 Moon Landing: Spacecraft Design Then and Now.

Helicopter Modeling and Simulation
Demonstrates how to model, simulate, control, and visualize a UH-1H helicopter system in Simulink® using the Rotor (Aerospace Blockset) and 6DOF (Euler Angles) (Aerospace Blockset) blocks from Aerospace Blockset™.

Designing a High Angle of Attack Pitch Mode Control
Use Control System Toolbox™, Simulink® Control Design™ and Aerospace Blockset™ to design a flight control system for the longitudinal motion of aircraft. You develop a controller that enables stable operation at high angles of attack with minimal pilot workload.

Simulate Motion in Six Degrees of Freedom (6DOF)
Model six degrees of freedom (6DOF) motion in Simulink® using the 6DOF (Euler Angles) (Aerospace Blockset) or 6DOF (Quaternion) (Aerospace Blockset) blocks. The model replicates the motions experienced by an object or vehicle, including three axes of rotation (pitch, roll, and yaw) and three axes of translation.
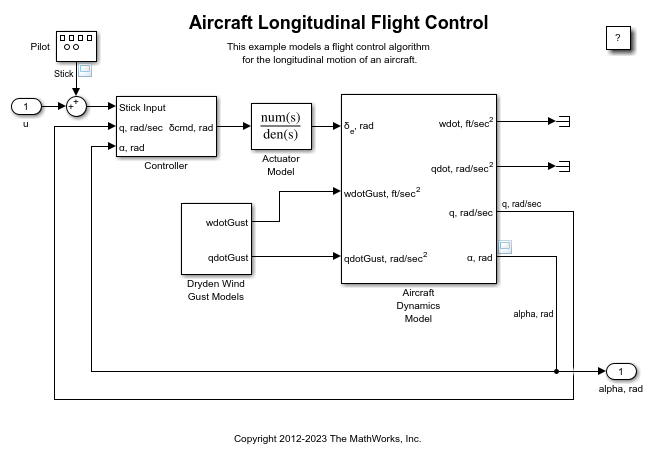
Contrôle de vol longitudinal d’un avion
Modéliser le contrôle de vol pour le mouvement longitudinal d’un avion à l’aide des approximations linéaires de premier ordre.

Air Traffic Control Radar Design
Model a conceptual air traffic control (ATC) radar simulation based on the radar range equation.
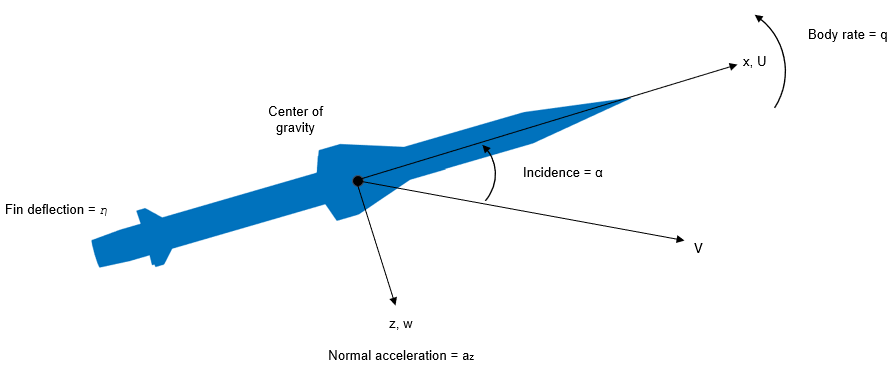
Design a Guidance System in MATLAB and Simulink
Use the model of the missile airframe presented in a number of published papers on the use of advanced control methods applied to missile autopilot design. See [1], [2], and [3]. The model represents a tail-controlled missile traveling between Mach 2 and Mach 4, at altitudes ranging between 10,000 ft (3,050 m) and 60,000 ft (18,290 m), with typical angles of attack ranging between +/- 20 degrees.

Airframe Trim and Linearize
Trim and linearize an airframe model using Simulink® Control Design™, Control System Toolbox™, and Aerospace Blockset™.