Parameter Tuning and Data Logging
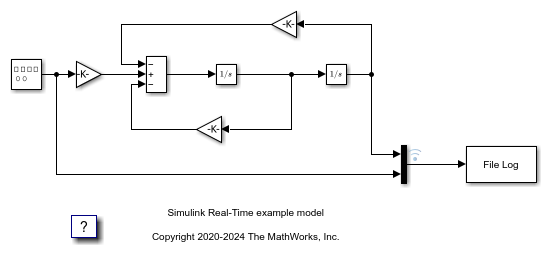
This example shows how to use real-time parameter tuning and data logging with Simulink® Real-Time™. After the example builds the model and downloads the real-time application, slrt_ex_param_tuning, to the target computer, the example executes multiple runs with the gain 'Gain1/Gain' changed (tuned) before each run. The gain sweeps from 0.1 to 0.7 in steps of 0.05.
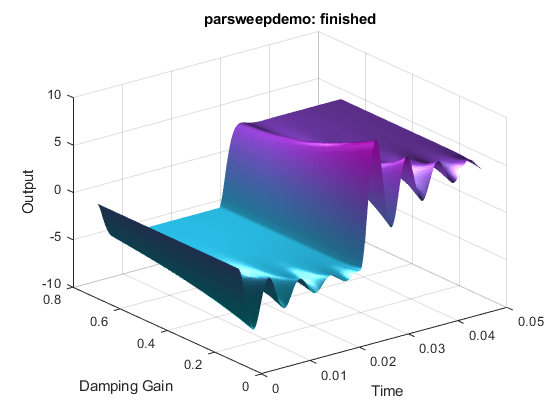
The example uses the data logging capabilities of Simulink Real-Time to capture signals of interest during each run. The logged signals are uploaded to the development computer and plotted. A 3-D plot of the oscillator output versus time versus gain is displayed.
Create Target Object and Connect
Create a Target object for the default target computer and connect to the target computer. In the Command Window, type:
tg = slrealtime; connect(tg);
Open, Build, and Download Model to the Target Computer
Open the model, slrt_ex_param_tuning. The model configuration parameters select the system target file (STF) that corresponds to the connected target computer, tg. Building the model creates a real-time application, slrt_ex_param_tuning.mldatx, that runs on the target computer.
model = 'slrt_ex_param_tuning'; open_system(model); modelSTF = getSTFName(tg); set_param(model,"SystemTargetFile",modelSTF); set_param(model,'RTWVerbose','off'); set_param(model,'StopTime','0.2');
Build the model and download the real-time application, slrt_ex_param_tuning.mldatx, to the target computer.
Configure for a non-Verbose build.
Build and download application.
evalc('slbuild(model)');
load(tg,model);
Run Model, Sweep 'Gain' Parameter, Plot Logged Data
This code accomplishes several tasks.
Task 1: Create Target Object
Create the MATLAB® variable, tg, that contains the Simulink Real-Time target object. This object lets you communicate with and control the target computer.
Create a Simulink Real-Time target object.
Set stop time to 0.2s.
Task 2: Run the Model and Plot Results
Run the model, sweeping through and changing the gain (damping parameter) before each run. Plot the results for each run.
If no plot figure exist, create the figure.
If the plot figure exist, make it the current figure.
Task 3: Loop over damping factor z
Set damping factor (Gain1/Gain).
Start run of the real-time application.
Store output data in
outp,y, andtvariables.Plot data for current run.
Task 4: Create 3-D Plot (Oscillator Output vs. Time vs. Gain)
Loop over damping factor.
Create a plot of oscillator output versus time versus gain.
Create 3-D plot.
figh = findobj('Name', 'parsweepdemo'); if isempty(figh) figh = figure; set(figh, 'Name', 'parsweepdemo', 'NumberTitle', 'off'); else figure(figh); end y = []; flag = 0; for z = 0.1 : 0.05 : 0.7 if isempty(find(get(0, 'Children') == figh, 1)) flag = 1; break; end load(tg,model); tg.setparam([model '/Gain1'],'Gain',2 * 1000 * z); tg.start('AutoImportFileLog',true, 'ExportToBaseWorkspace', true); pause(0.4); outp = logsOut{1}.Values; y = [y,outp.Data(:,1)]; t = outp.Time; plot(t,y); set(gca, 'XLim', [t(1), t(end)], 'YLim', [-10, 10]); title(['parsweepdemo: Damping Gain = ', num2str(z)]); xlabel('Time'); ylabel('Output'); drawnow; end if ~flag delete(gca); surf(t(1 : 200), 0.1 : 0.05 : 0.7, y(1 : 200, :)'); colormap cool shading interp h = light; set(h, 'Position', [0.0125, 0.6, 10], 'Style', 'local'); lighting gouraud title('parsweepdemo: finished'); xlabel('Time'); ylabel('Damping Gain'); zlabel('Output'); end
Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ... Importing Log file 1 of 1 ...
Close Model
When done, close the model.
close_system(model,0);
See Also
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)