Aerospace
Simscape™ Multibody™ provides tools to model and simulate complex mechanical systems in aircraft and spacecraft design. You can simulate a system under various space conditions.
Featured Examples
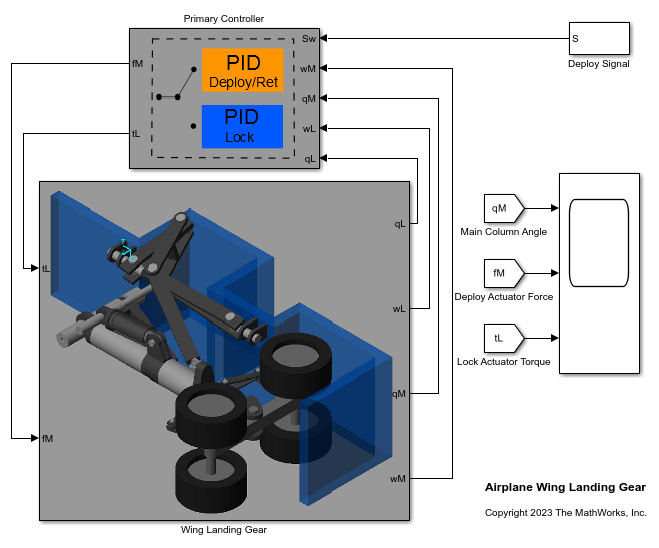
Airplane Wing Landing Gear
A wing landing gear mechanism that can deploy and retract based on the input deploy signal. The mechanism consists of the main column that houses the wheel assembly and the locking mechanism that is used to lock the landing gear in the deployed position.
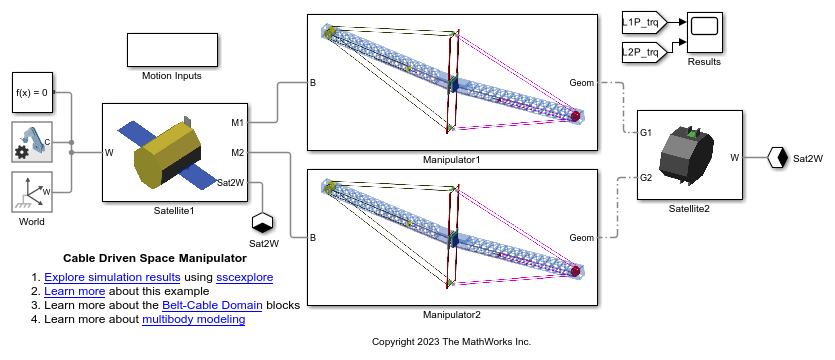
Cable Driven Space Manipulator
Models a cable driven space manipulator. The manipulator comprises of 2 links connected via a system of revolute joints. Each link consists of belt-cable circuits which drive the movements of the manipulator. It also consists of a spring-damper system which provides different stiffness requirements. A space application is shown in this example where the objective of the manipulators is to capture a small satellite. The manipulators start from folded states and then perform necessary maneuvers to extend and reach the desired position. The pulleys are motion actuated from which necessary belt-cable kinematics are computed.

Modeling and Control of a Mars Rover
Models a mars rover performing a sample retrieval task using Simscape Multibody and Robotics System Toolbox. The rover follows a desired path on a rigid terrain surface, stops at the target location and uses its manipulator to pick and store a sample from the surface. It uses the following key features to model different aspects of the application: