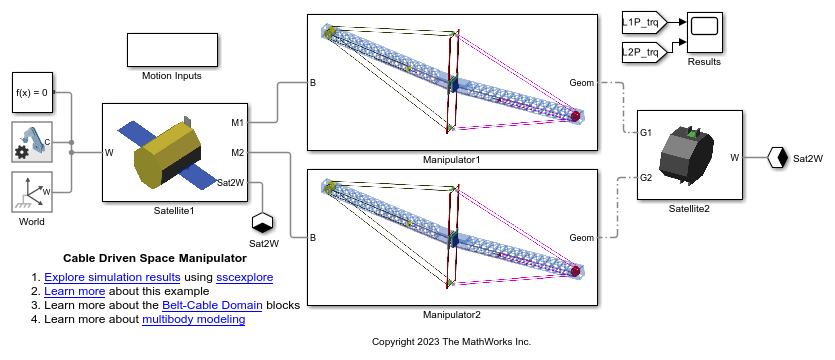
Cable Driven Space Manipulator
This example models a cable driven space manipulator. The manipulator comprises of 2 links connected via a system of revolute joints. Each link consists of belt-cable circuits which drive the movements of the manipulator. It also consists of a spring-damper system which provides different stiffness requirements. A space application is shown in this example where the objective of the manipulators is to capture a small satellite. The manipulators start from folded states and then perform necessary maneuvers to extend and reach the desired position. The pulleys are motion actuated from which necessary belt-cable kinematics are computed.
Model
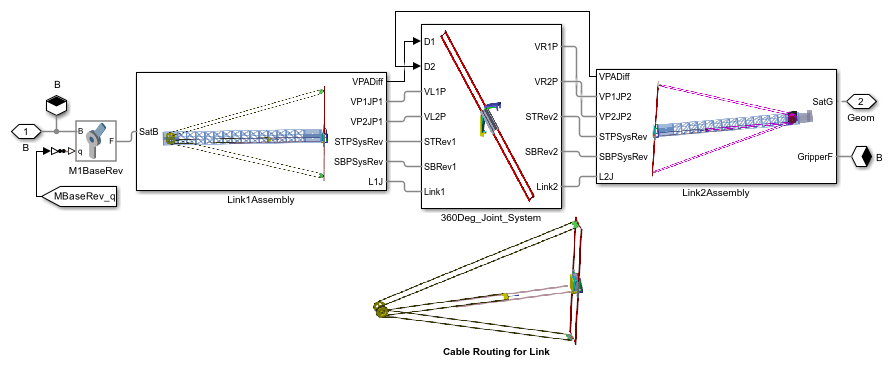
Manipulator Subsystem
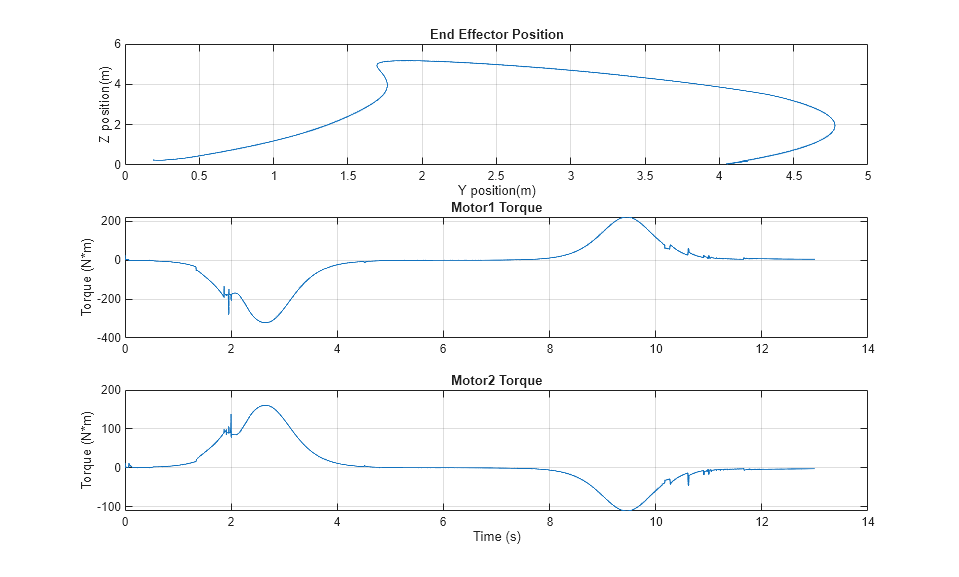
Simulation Results from Simscape Logging
The plot below shows the Gripper Position and the torque applied to the motor pulleys.
References : [1] W.R. Doggett, J.T. Dorsey, T.C. Jones, B. King (2014). Development of a Tendon-Actuated Lightweight In-Space MANipulator (TALISMAN)