procrustes
Procrustes analysis
Syntax
Description
d = procrustes(X,Y)X and Y, which are represented by configurations
of landmark points.
d = procrustes(X,Y,Name,Value)
Examples
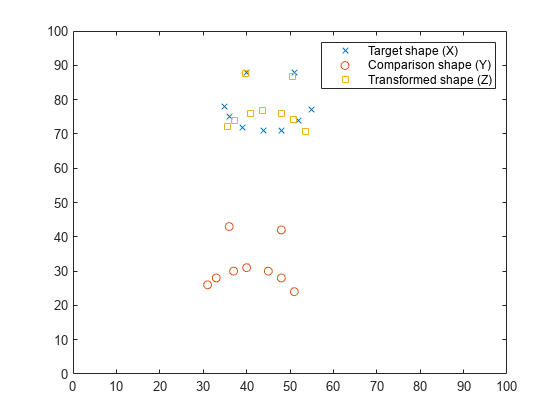
Construct matrices containing landmark points for two shapes, and visualize the shapes by plotting their landmark points.
X = [40 88; 51 88; 35 78; 36 75; 39 72; 44 71; 48 71; 52 74; 55 77]; Y = [36 43; 48 42; 31 26; 33 28; 37 30; 40 31; 45 30; 48 28; 51 24]; plot(X(:,1),X(:,2),"x") hold on plot(Y(:,1),Y(:,2),"o") xlim([0 100]) ylim([0 100]) legend("Target shape (X)","Comparison shape (Y)")

Compare the shapes and view their Procrustes distance.
[d,Z] = procrustes(X,Y)
d = 0.2026
Z = 9×2
39.7694 87.5089
50.5616 86.8011
35.5487 72.1631
37.3131 73.9909
40.8735 75.8503
43.5517 76.7959
48.0577 75.9771
50.7835 74.2286
53.5410 70.6841
Visualize the shape that results from superimposing Y onto X.
plot(Z(:,1),Z(:,2),"s") legend("Target shape (X)","Comparison shape (Y)", ... "Transformed shape (Z)") hold off
Use the Procrustes transformation returned by procrustes to analyze how it superimposes the comparison shape onto the target shape.
Generate sample data in two dimensions.
rng("default")
n = 10;
Y = normrnd(0,1,[n 2]);Create the target shape X by rotating Y 60 degrees (pi/3 in radians), scaling the size of Y by factor 0.5, and then translating the points by adding 2. Also, add some noise to the landmark points in X.
S = [cos(pi/3) -sin(pi/3); sin(pi/3) cos(pi/3)]
S = 2×2
0.5000 -0.8660
0.8660 0.5000
X = normrnd(0.5*Y*S+2,0.05,n,2);
Find the Procrustes transformation that can transform Y to X.
[~,Z,transform] = procrustes(X,Y);
Display the components of the Procrustes transformation.
transform
transform = struct with fields:
T: [2×2 double]
b: 0.4845
c: [10×2 double]
transform.T
ans = 2×2
0.4832 -0.8755
0.8755 0.4832
transform.c
ans = 10×2
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
2.0325 1.9836
transform.T is similar to the matrix S. Also, the scale component (transform.b) is close to 0.5, and the translation component values (transform.c) are close to 2.
Determine whether transform.T indicates a rotation or reflection by computing the determinant of transform.T. The determinant of a rotation matrix is 1, and the determinant of a reflection matrix is –1.
det(transform.T)
ans = 1.0000
In two-dimensional space, a rotation matrix that rotates a point by an angle of degrees about the origin has the form
.
If you use either or , the rotation angle has two possible values between –180 and 180. Use both the and values to determine the rotation angle of the matrix without ambiguity. Using the atan2d function, you can determine the value from and , and also determine the angle.
theta = atan2d(transform.T(2,1),transform.T(1,1))
theta = 61.1037
transform.T is a rotation matrix of 61 degrees.
Use the Procrustes transformation returned by procrustes to analyze how it superimposes the comparison shape onto the target shape.
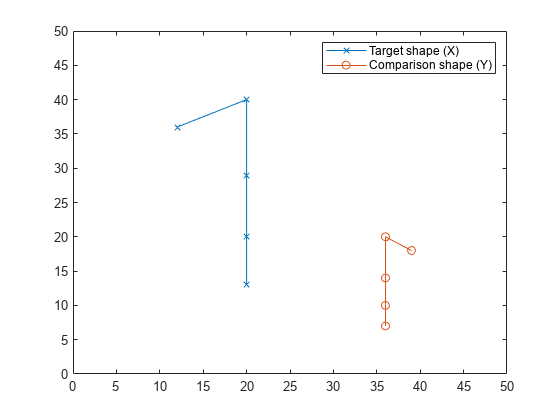
Create matrices with landmark points for two separate shapes.
X = [20 13; 20 20; 20, 29; 20 40; 12 36]; Y = [36 7; 36 10; 36 14; 36 20; 39 18];
Plot the landmark points to visualize the shapes.
plot(X(:,1),X(:,2),"-x") hold on plot(Y(:,1),Y(:,2),"-o") xlim([0 50]) ylim([0 50]) legend("Target shape (X)","Comparison shape (Y)") hold off
Obtain the Procrustes transformation by using procrustes.
[d,Z,transform] = procrustes(X,Y)
d = 0.0064
Z = 5×2
20.1177 13.3935
19.9145 19.6790
19.6435 28.0597
19.2371 40.6306
13.0871 36.2371
transform = struct with fields:
T: [2×2 double]
b: 2.0963
c: [5×2 double]
transform.T
ans = 2×2
-0.9995 -0.0323
-0.0323 0.9995
transform.c
ans = 5×2
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
96.0177 1.1661
The scale component of the transformation b indicates that the scale of X is about twice the scale of Y.
Find the determinant of the rotation and reflection component of the transformation.
det(transform.T)
ans = -1.0000
The determinant is –1, which means that the transformation contains a reflection.
In two-dimensional space, a reflection matrix has the form
,
which indicates a reflection over a line that makes an angle with the x-axis.
If you use either or , the angle for the line of reflection has two possible values between –90 and 90. Use both the and values to determine the angle for the line of reflection without ambiguity. Using the atan2d function, you can determine the value from and , and also determine the angle.
theta = atan2d(transform.T(2,1),transform.T(1,1))/2
theta = -89.0741
transform.T reflects points across a line that makes roughly a –90 degree angle with the x-axis; this line indicates the y-axis. The plots of X and Y show that reflecting across the y-axis is required to superimpose Y onto X.
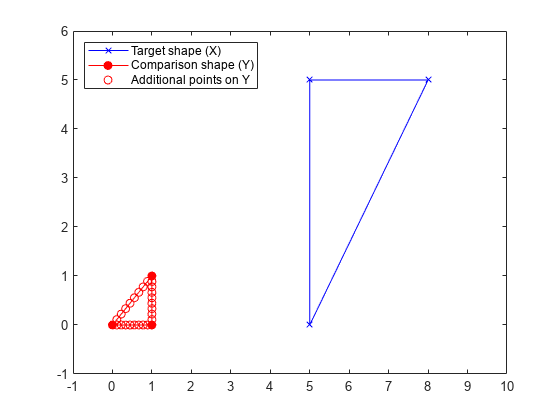
Find the Procrustes transformation for landmark points, and apply the transformation to more points on the comparison shape than just the landmark points.
Create matrices with landmark points for two triangles X (target shape) and Y (comparison shape).
X = [5 0; 5 5; 8 5]; Y = [0 0; 1 0; 1 1];
Create a matrix with more points on the triangle Y.
Y_points = [linspace(Y(1,1),Y(2,1),10)' linspace(Y(1,2),Y(2,2),10)'
linspace(Y(2,1),Y(3,1),10)' linspace(Y(2,2),Y(3,2),10)'
linspace(Y(3,1),Y(1,1),10)' linspace(Y(3,2),Y(1,2),10)'];Plot both shapes, including the larger set of points for the comparison shape.
plot([X(:,1); X(1,1)],[X(:,2); X(1,2)],"bx-") hold on plot([Y(:,1); Y(1,1)],[Y(:,2); Y(1,2)],"ro-","MarkerFaceColor","r") plot(Y_points(:,1),Y_points(:,2),"ro") xlim([-1 10]) ylim([-1 6]) legend("Target shape (X)","Comparison shape (Y)", ... "Additional points on Y","Location","northwest")
Call procrustes to obtain the Procrustes transformation from the comparison shape to the target shape.
[d,Z,transform] = procrustes(X,Y)
d = 0.0441
Z = 3×2
5.0000 0.5000
4.5000 4.5000
8.5000 5.0000
transform = struct with fields:
T: [2×2 double]
b: 4.0311
c: [3×2 double]
Use the Procrustes transformation to superimpose the other points (Y_points) on the comparison shape onto the target shape, and then visualize the results.
Z_points = transform.b*Y_points*transform.T + transform.c(1,:); plot([Z(:,1); Z(1,1)],[Z(:,2); Z(1,2)],"ks-","MarkerFaceColor","k") plot(Z_points(:,1),Z_points(:,2),"ks") legend("Target shape (X)","Comparison shape (Y)", ... "Additional points on Y","Transformed shape (Z)", ... "Transformed additional points","Location","best") hold off

Construct the shapes of the handwritten letters d and b using landmark points, and then plot the points to visualize the letters.
D = [33 93; 33 87; 33 80; 31 72; 32 65; 32 58; 30 72;
28 72; 25 69; 22 64; 23 59; 26 57; 30 57];
B = [48 83; 48 77; 48 70; 48 65; 49 59; 49 56; 50 66;
52 66; 56 65; 58 61; 57 57; 54 56; 51 55];
plot(D(:,1),D(:,2),"x-")
hold on
plot(B(:,1),B(:,2),"o-")
legend("Target shape (d)","Comparison shape (b)")
hold off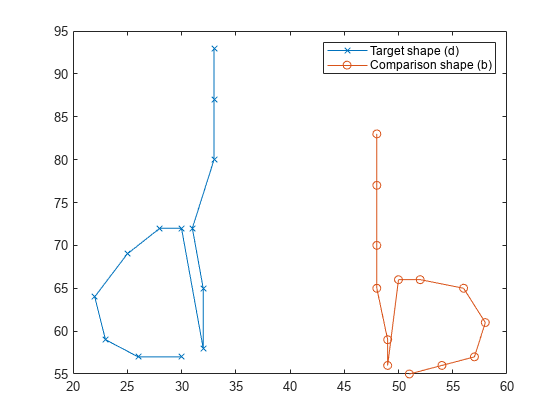
Use procrustes to compare the letters with reflection turned off, because reflection would turn the b into a d and not accurately preserve the shape you want to compare.
d = procrustes(D,B,"reflection",false)d = 0.3425
Try using procrustes with reflection on to see how the Procrustes distance differs.
d = procrustes(D,B,"reflection","best")
d = 0.0204
This reflection setting results in a smaller Procrustes distance because reflecting b better aligns it with d.
Construct two shapes represented by their landmark points, and then plot the points to visualize them.
X = [20 13; 20 20; 20 29; 20 40; 12 36]; Y = [36 7; 36 10; 36 14; 36 20; 39 18]; plot(X(:,1),X(:,2),"-x") hold on plot(Y(:,1),Y(:,2),"-o") xlim([0 50]) ylim([0 50]) legend("Target shape (X)","Comparison shape (Y)")

Compare the two shapes using Procrustes analysis with scaling turned off.
[d,Z] = procrustes(X,Y,"scaling",false)d = 0.2781
Z = 5×2
19.2194 20.8229
19.1225 23.8214
18.9932 27.8193
18.7993 33.8162
15.8655 31.7202
Visualize the superimposed landmark points.
plot(Z(:,1),Z(:,2),"-s") legend("Target shape (X)","Comparison shape (Y)", ... "Transformed shape (Z)") hold off

The superimposed shape Z does not differ in scale from the original shape Y.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Tips
Procrustes analysis is appropriate when all dimensions in
XandYhave similar scales. If the columns ofXandYhave different scales, standardize the columns by usingzscoreornormalize.Procrustes analysis is useful in conjunction with multidimensional scaling. Two different applications of multidimensional scaling can produce reconstructed points that are similar in principle, but look different because they have different orientations. Also, the reconstructed points can have a different orientation than the original points. The
procrustesfunction transforms one set of points to make them more comparable to the other. For an example, see Classical Multidimensional Scaling Applied to Nonspatial Distances.
References
[1] Kendall, David G. “A Survey of the Statistical Theory of Shape.” Statistical Science. Vol. 4, No. 2, 1989, pp. 87–99.
[2] Bookstein, Fred L. Morphometric Tools for Landmark Data. Cambridge, UK: Cambridge University Press, 1991.
[3] Seber, G. A. F. Multivariate Observations. Hoboken, NJ: John Wiley & Sons, Inc., 1984.
Version History
Introduced before R2006a