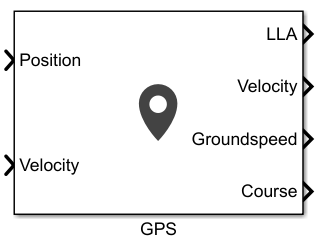
GPS
Libraries:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
Description
The block outputs noise-corrupted GPS measurements based on the input position and velocity in the local coordinate frame or geodetic frame. It uses the WGS84 earth model to convert local coordinates to latitude-longitude-altitude LLA coordinates.
Examples
Add GPS Sensor Noise to Multirotor Guidance Model
Use a GPS Block to add sensor noise to the position and velocity output of a guidance model in Simulink®.
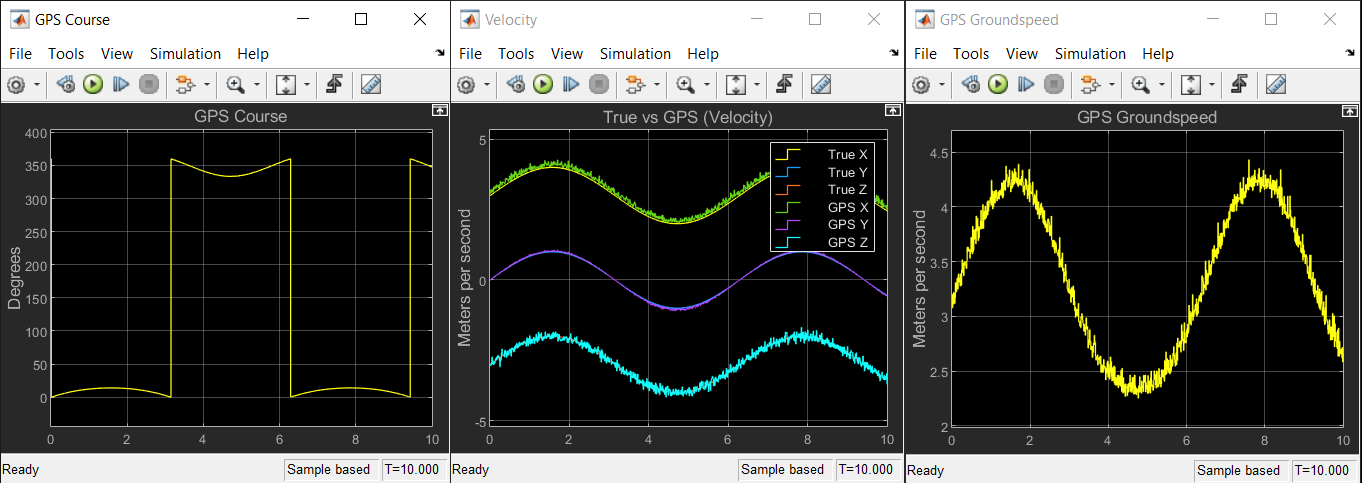
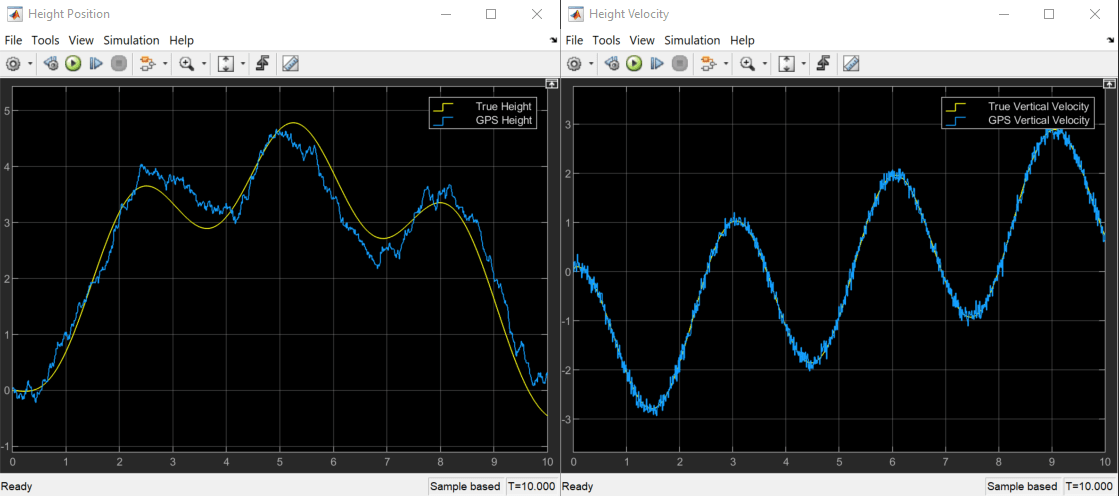
Simulate GPS Sensor Noise
Use the GPS block to add GPS sensor noise to position and velocity inputs in Simulink®.
Ports
Input
Specify the input position of the GPS receiver in the navigation coordinate system as a real, finite N-by-3 matrix. N is the number of samples in the current frame. The format of the matrix rows differs depending on the value of the Position input format parameter.
If the value of the Position input format parameter is
Local, specify each row of the Position as Cartesian coordinates in meters with respect to the local navigation reference frame, specified by the Reference frame parameter, with the origin specified by the Reference location parameter.If the value of the Position input format parameter is
Geodetic, specify each row of the Position input as geodetic coordinates of the form[latitude longitude altitude]. The values oflatitudeandlongitudeare in degrees.Altitudeis the height above the WGS84 ellipsoid model in meters.
Data Types: single | double
Specify the input velocity of the GPS receiver in the navigation coordinate system in meters per second as a real, finite N-by-3 matrix. N is the number of samples in the current frame. The format of the matrix rows differs depending on the value of the Position input format parameter.
If the value of the Position input format parameter is
Local, specify each row of the Velocity with respect to the local navigation reference frame (NED or ENU), specified by the Reference frame parameter, with the origin specified by the Reference location parameter.If the value of the Position input format parameter is
Geodetic, specify each row of the Velocity with respect to the navigation reference frame (NED or ENU), specified by the Reference frame parameter, with the origin specified by Position.
Data Types: single | double
Output
Position of the GPS receiver in the geodetic latitude, longitude, and altitude (LLA) coordinate system, returned as a real, finite N-by-3 array. Latitude and longitude are in degrees with North and East being positive. Altitude is in meters.
N is the number of samples in the current frame.
Data Types: single | double
Velocity of the GPS receiver in the local navigation coordinate system in meters per second, returned as a real, finite N-by-3 matrix. N is the number of samples in the current frame. The format of the matrix rows differs depending on the value of the Position input format parameter.
If the value of the Position input format parameter is
Local, the Velocity output is with respect to the local navigation reference frame (NED or ENU), specified by the Reference frame parameter, with the origin specified by the Reference location parameter.If the value of the Position input format parameter is
Geodetic, the Velocity output is with respect to the navigation reference frame (NED or ENU), specified by the Reference frame parameter, with the origin specified by LLA.
Data Types: single | double
Magnitude of the horizontal velocity of the GPS receiver in the local navigation coordinate system in meters per second, returned as a real, finite N-element column vector.
N is the number of samples in the current frame.
Data Types: single | double
Direction of the horizontal velocity of the GPS receiver in the local navigation coordinate system, in degrees, returned as a real, finite N-element column vector of values from 0 to 360. North corresponds to 0 degrees and East corresponds to 90 degrees.
N is the number of samples in the current frame.
Data Types: single | double
Parameters
Specify the reference frame as NED (North-East-Down) or
ENU (East-North-Up).
Specify the position coordinate input format as Local or
Geodetic.
If you set this parameter to
Local, then the input to the Position port must be in the form of Cartesian coordinates with respect to the local navigation frame, specified by the Reference Frame parameter, with the origin fixed and defined by the Reference location parameter. The input to the Velocity input port must also be with respect to this local navigation frame.If you set this parameter to
Geodetic, then the input to the Position port must be geodetic coordinates in[latitude longitude altitude]. The input to the Velocity input port must also be with respect to the navigation frame specified by the Reference frame parameter, with the origin corresponding to the Position port.
Specify the origin of the local reference frame as a three-element row vector in
geodetic coordinates [latitude longitude altitude], where
altitude is the height above the reference ellipsoid model WGS84.
The reference location values are in degrees, degrees, and meters, respectively. The
degree format is decimal degrees (DD).
Dependencies
To enable this parameter, set the Position input
format parameter to Local.
Specify horizontal position accuracy as a nonnegative real scalar in meters. The horizontal position accuracy specifies the standard deviation of the noise in the horizontal position measurement. Increasing this value adds noise to the measurement, decreasing its accuracy.
Tunable: Yes
Specify vertical position accuracy as a nonnegative real scalar in meters. The vertical position accuracy specifies the standard deviation of the noise in the vertical position measurement. Increasing this value adds noise to the measurement, decreasing its accuracy.
Tunable: Yes
Specify velocity accuracy per second as a nonnegative real scalar in meters. The velocity accuracy specifies the standard deviation of the noise in the velocity measurement. Increasing this value adds noise to the measurement, decreasing its accuracy.
Tunable: Yes
Specify the global position noise decay factor as a numeric scalar in the range [0,
1]. A decay factor of 0 models the global position noise as a white
noise process. A decay factor of 1 models the global position noise as a random walk
process.
Tunable: Yes
Specify the initial seed of an mt19937ar random number generator algorithm as a nonnegative integer.
Select the type of simulation to run from these options:
Interpreted execution— Simulate the model using the MATLAB® interpreter. For more information, see Interpreted Execution vs. Code Generation (Simulink).Code generation— Simulate the model using generated C code. The first time you run a simulation, Simulink® generates C code for the block. The C code is reused for subsequent simulations, as long as the model does not change.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2021b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Sélectionner un site web
Choisissez un site web pour accéder au contenu traduit dans votre langue (lorsqu'il est disponible) et voir les événements et les offres locales. D’après votre position, nous vous recommandons de sélectionner la région suivante : .
Vous pouvez également sélectionner un site web dans la liste suivante :
Comment optimiser les performances du site
Pour optimiser les performances du site, sélectionnez la région Chine (en chinois ou en anglais). Les sites de MathWorks pour les autres pays ne sont pas optimisés pour les visites provenant de votre région.
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)