detect
Syntax
Description
bboxes = detect(detector,I)I, using a
pretrained deep learning-based people detector, detector. The
detect function returns the locations of detected people in the input
image as a set of bounding boxes.
Note
This functionality requires Deep Learning Toolbox™.
detectionResults = detect(detector,ds)ds.
[___] = detect(___,
detects people within the rectangular region of interest roi)roi, in
addition to any combination of arguments from previous syntaxes.
[___] = detect(___,
specifies options using one or more name-value arguments. For example,
Name=Value)Threshold=0.75 specifies a detection threshold of 0.75.
Examples
Load the default pretrained people detector model.
detector = peopleDetector;
Read a test image into the workspace.
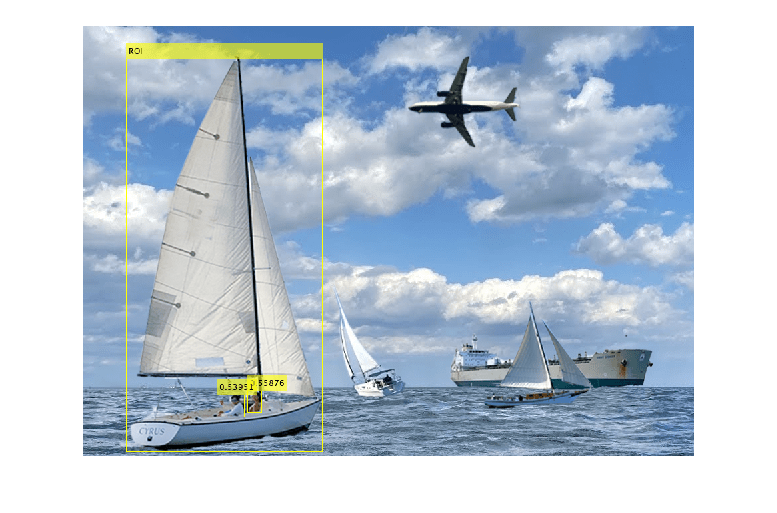
I = imread("boats.png");Specify a rectangular region of interest (ROI) that encloses the first boat within the test image.
roiBox = [65 50 295 590];
Detect people in the first boat in the image using a Threshold value of 0.45.
[bboxes,scores] = detect(detector,I,roiBox,Threshold=0.45);
Annotate the detected people with bounding boxes and their detection scores.
img = insertObjectAnnotation(I,"rectangle",roiBox,"ROI"); detectedImg = insertObjectAnnotation(img,"rectangle",bboxes,scores); figure imshow(detectedImg)