findNearestNeighbors
Find nearest neighbors of query points in point cloud
Syntax
Description
[
returns the indices,dists] = findNearestNeighbors(ptCloud,points,K)indices for the K-nearest neighbors of one or more query
points in the input point cloud. ptCloud can be an unorganized or
organized point cloud. The K-nearest neighbors of the query points are computed by using the
Kd-tree based search algorithm.
[
returns the K-nearest neighbors of one or more query points in the input point cloud. The
input point cloud is an organized point cloud generated by a depth camera. The K-nearest
neighbors of the query points are determined using fast approximate K-nearest neighbor
search algorithm.indices,dists] = findNearestNeighbors(ptCloud,points,K,camMatrix)
The function uses the camera projection matrix camMatrix to know
the relationship between adjacent points and hence, speeds up the nearest neighbor search.
However, the results have lower accuracy as compared to the Kd-tree based approach.
Note
This syntax only supports organized point cloud data produced by RGB-D sensors.
You can use
estimateCameraMatrixto estimate camera projection matrix for the given point cloud data.
[
specifies options using one or more name-value arguments in addition to the input arguments
in the preceding syntaxes.indices,dists] = findNearestNeighbors(___,Name,Value)
Examples
Load a set of 3-D coordinate points into the workspace.
load("xyzPoints.mat");Create a point cloud object.
ptCloud = pointCloud(xyzPoints);
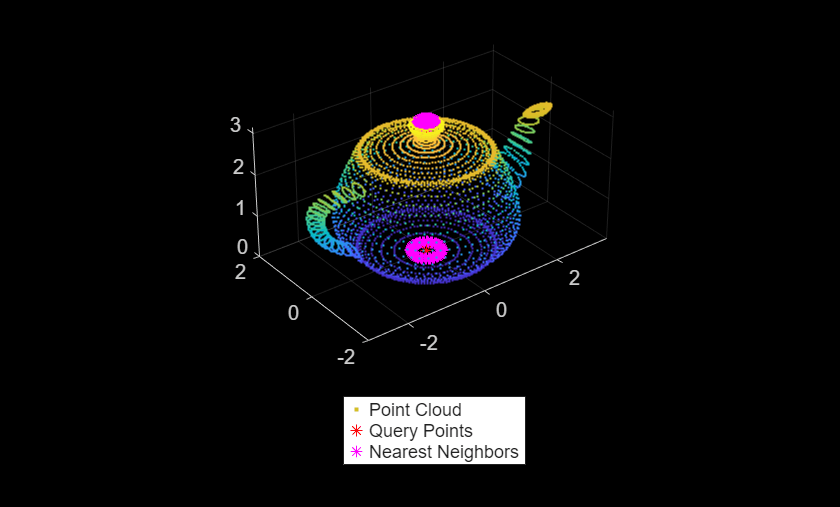
Specify two query points and the number of nearest neighbors to identify.
points = [0 0 0; 0 0 3]; K = 70;
Get the indices and the distances of the K nearest neighbors for each query point.
[indices,dists] = findNearestNeighbors(ptCloud,points,K);
Display the point cloud. Plot the query points and their nearest neighbors.
figure pcshow(ptCloud) hold on plot3(points(:,1),points(:,1),points(:,3),"*r") plot3(ptCloud.Location(indices,1), ... ptCloud.Location(indices,2), ... ptCloud.Location(indices,3),"*m") legend("Point Cloud","Query Points", ... "Nearest Neighbors", ... Location="southoutside", ... Color=[1 1 1]) hold off
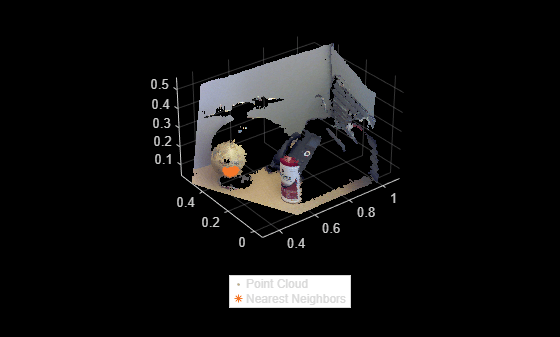
Find the K-nearest neighbors of a query point in the organized point cloud data by using the camera projection matrix. Compute the camera projection matrix from sampled point cloud data points and their corresponding image point coordinates.
Load an organized point cloud data into the workspace. The point cloud is generated by using the Kinect depth sensor.
ld = load('object3d.mat');
ptCloud = ld.ptCloud;Specify the step size for sampling the point cloud data.
stepSize = 100;
Sample the input point cloud and store the sampled 3-D point coordinates as a point cloud object.
indices = 1:stepSize:ptCloud.Count; tempPtCloud = select(ptCloud,indices);
Remove invalid points from the sampled point cloud.
[tempPtCloud,validIndices] = removeInvalidPoints(tempPtCloud);
Define the 3-D world point coordinates of input point cloud.
worldPoints = tempPtCloud.Location;
Find the 2-D image coordinates corresponding to the 3-D point coordinates of input point cloud.
[Y,X] = ind2sub([size(ptCloud.Location,1),size(ptCloud.Location,2)],indices); imagePoints = [X(validIndices)' Y(validIndices)'];
Estimate camera projection matrix from the image and the world point coordinates.
camMatrix = estimateCameraMatrix(imagePoints,worldPoints);
Specify a query point and the number of nearest neighbors to be identified.
point = [0.4 0.3 0.2]; K = 1000;
Find the indices and distances of K nearest neighboring points by using the camera projection matrix. Use the point cloud method select to get the point cloud data of nearest neighbors.
[indices,dists] = findNearestNeighbors(ptCloud,point,K,camMatrix); ptCloudB = select(ptCloud,indices);
Display the point cloud and the nearest neighbors of the query point.
figure pcshow(ptCloud) hold on plot3(ptCloudB.Location(:,1),ptCloudB.Location(:,2),ptCloudB.Location(:,3),'*') legend('Point Cloud','Nearest Neighbors','Location','southoutside','Color',[1 1 1]) hold off
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Muja, M. and David G. Lowe. "Fast Approximate Nearest Neighbors with Automatic Algorithm Configuration". In VISAPP International Conference on Computer Vision Theory and Applications. 2009. pp. 331–340.
Extended Capabilities
Version History
Introduced in R2015aSee Also
pointCloud | findNeighborsInRadius | estimateCameraMatrix | cameraMatrix