3 Ways to Build a Model | Understanding PID Control, Part 5
From the series: Understanding PID Control
Brian Douglas
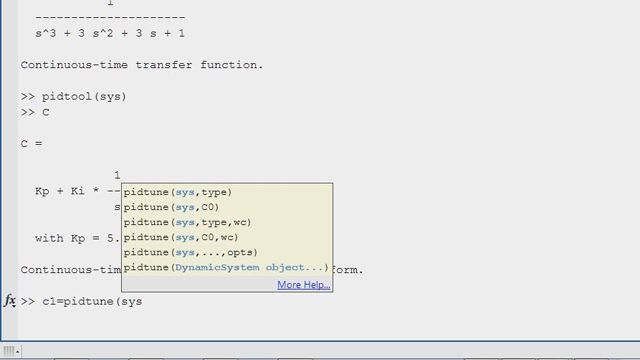
Tuning a PID controller requires that you have a representation of the system you’re trying to control. This could be the physical hardware or a mathematical representation of that hardware.
If you have physical hardware, you could guess at some PID gains, run a test to see how it performs, and then tweak the gains as necessary. This guess-and-check brute force tuning method might work, but you have other, more precise, options available if you have a mathematical model of the system. Therefore, this video presents three different ways to model your system so that you can take advantage of each of these methods when tuning your controller.
The first method uses a detailed understanding of the system to develop the model with first principles. The second method uses system identification, the known input, and resulting output signal to fit the data to the model structure of your choice. The third method creates a model by linearizing an existing nonlinear model around a given operating point.
With any of these models, you can start the process of developing and tuning a PID controller.
Published: 1 Aug 2018