convintrlv
Permute symbols using shift registers
Syntax
intrlved = convintrlv(data,nrows,slope)
[intrlved,state] = convintrlv(data,nrows,slope)
[intrlved,state] = convintrlv(data,nrows,slope,init_state)
Description
intrlved = convintrlv(data,nrows,slope)
permutes the elements in data by using a set of
nrows internal shift registers. Before the function begins to
process data, it initializes all shift registers with zeros. If
data is a matrix with multiple rows and columns, the function
processes the columns independently. For information about delays, see Delays of Convolutional Interleaving and Deinterleaving.
[intrlved,state] = convintrlv(data,nrows,slope)
returns a structure that holds the final state of the shift registers.
state.value stores any unshifted symbols.
state.index is the index of the next register to be
shifted.
[intrlved,state] = convintrlv(data,nrows,slope,init_state)
initializes the shift registers with the symbols contained in
init_state.value and directs the first input symbol to the
shift register referenced by init_state.index. The structure
init_state is typically the state output
from a previous call to this same function, and is unrelated to the corresponding
deinterleaver.
Examples
The example below shows that convintrlv is a special case
of the more general function muxintrlv. Both functions
yield the same numerical results.
x = randi([0 1],100,1); % Original data nrows = 5; % Use 5 shift registers slope = 3; % Delays are 0, 3, 6, 9, and 12. y = convintrlv(x,nrows,slope); % Interleaving using convintrlv. delay = [0:3:12]; % Another way to express set of delays y1 = muxintrlv(x,delay); % Interleave using muxintrlv. isequal(y,y1)
The output below shows that y, obtained using
convintrlv, and y1, obtained using
muxintrlv, are the same.
ans =
1
Another example using this function is in Effect of Delays on Recovery of Convolutionally Interleaved Data Using MATLAB.
The example on the muxdeintrlv reference page
illustrates how to use the state output and
init_state input with that function; the process is analogous
for this function.
More About
The total delay due to a convolutional interleaver and deinterleaver pair is N × slope × (N – 1).
N is the number of registers and equals the value of the
nrowsargumentslope is the register length step and equals the value of the
slopeargument
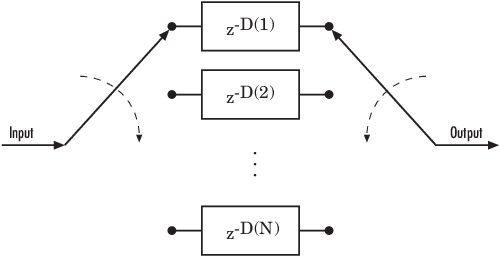
This diagram shows the structure of a general convolutional interleaver comprised of a set of shift registers, each having a specified delay shown as D(1), D(2),..., D(N), and a commutator to switch input and output symbols through registers. The kth shift register holds D(k) symbols, where k = 1, 2, 3, … N. The kth shift register has a delay value of ((k–1) × slope). With each new input symbol, the commutator switches to a new register and shifts in the new symbol while shifting out the oldest symbol in that register. When the commutator reaches the Nth register, upon the next new input, the commutator returns to the first register.
References
[1] Heegard, Chris and Stephen B. Wicker. Turbo Coding. Boston: Kluwer Academic Publishers, 1999.
Version History
Introduced before R2006a