lqi
Contrôle linéaire quadratique intégral
Syntaxe
[K,S,e] = lqi(SYS,Q,R,N)
Description
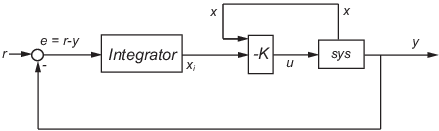
lqi calcule une loi de système d’asservissement d'état pour la boucle de suivi illustrée à la figure suivante.
Pour un système physique sys avec équations de représentation d'état (ou leur équivalent discret) :
le système d’asservissement d'état présente la forme
où xi correspond à la sortie de l'intégrateur. Cette loi de contrôle assure que la sortie y suit la commande de référence r. Pour les systèmes MIMO, le nombre d'intégrateurs équivaut à la dimension de la sortie y.
[K,S,e] = lqi(SYS,Q,R,N) calcule la matrice de gain optimale K avec un modèle de représentation d’état SYS pour le système physique et des matrices de pondération Q, R, N. La loi de contrôle u = -Kz = -K[x;xi] minimise les fonctions de coût suivantes (pour r = 0)
pour le temps continu
pour le temps discret
En temps discret, lqi calcule la sortie de l'intégrateur xi au moyen de la formule d'Euler
où Ts correspond au pas d'échantillonnage de SYS.
Lorsque vous omettez la matrice N, N est réglé sur 0. lqi renvoie la solution S de l'équation algébrique de Riccati associée et les valeurs propres en boucle fermée e.
Limitations
Pour le système de représentation d'état suivant avec un système physique à intégrateur augmenté :
Les données relatives au problème doivent répondre remplir les conditions suivantes :
La paire (A, B) doit pouvoir être stabilisée.
R doit être un nombre défini positif.
doit être un nombre semi-défini positif (de manière équivalente, ).
ne doit pas présenter de mode non détectable sur l’axe imaginaire (ou le cercle unitaire en temps discret).
Conseils
lqi prend en charge les modèles de descripteur avec E non singulier. La sortie S de lqi correspond à la solution de l'équation de Riccati pour le modèle de représentation d’état explicite équivalent
Références
[1] P. C. Young and J. C. Willems, "An approach to the linear multivariable servomechanism problem", International Journal of Control, Volume 15, Issue 5, May 1972 , pages 961–979.
Historique des versions
Introduit dans R2008b