lqr
Design d'un régulateur linéaire quadratique (LQR, Linear Quadratic Regulator)
Description
[ calcule la matrice de gain optimal K,S,P] = lqr(sys,Q,R,N)K, la solution S de l'équation algébrique de Riccati associée et les pôles en boucle fermée P pour le modèle de représentation d’état en temps continu ou en temps discret sys. Q et R sont respectivement les matrices de poids des états et des entrées. Lorsque la matrice des termes croisés N est omise, elle est définie sur zéro.
[ calcule la matrice de gain optimal K,S,P] = lqr(A,B,Q,R,N)K, la solution S de l'équation algébrique de Riccati associée et les pôles en boucle fermée P au moyen des matrices de représentation d’état en temps continu A et B. Cette syntaxe n’est valide que pour les modèles en temps continu. Pour les modèles en temps discret, utilisez dlqr.
Exemples
pendulumModelCart.mat contient le modèle de représentation d'état d'un pendule inversé sur un chariot où les sorties correspondent au déplacement du chariot x et à l'angle du pendule . L’entrée de contrôle u correspond à la force horizontale exercée sur le chariot.
Commencez par charger le modèle de représentation d’état sys dans l’espace de travail.
load('pendulumCartModel.mat','sys')
Étant donné que les sorties correspondent à x et à , et qu’il n’existe qu’une entrée, utilisez la règle de Bryson pour déterminer Q et R.
Q = [1,0,0,0;... 0,0,0,0;... 0,0,1,0;... 0,0,0,0]; R = 1;
Trouvez la matrice de gain K au moyen de lqr. Étant donné que N n’est pas spécifié, lqr définit N sur 0.
[K,S,P] = lqr(sys,Q,R)
K = 1×4
-1.0000 -1.7559 16.9145 3.2274
S = 4×4
1.5346 1.2127 -3.2274 -0.6851
1.2127 1.5321 -4.5626 -0.9640
-3.2274 -4.5626 26.5487 5.2079
-0.6851 -0.9640 5.2079 1.0311
P = 4×1 complex
-0.8684 + 0.8523i
-0.8684 - 0.8523i
-5.4941 + 0.4564i
-5.4941 - 0.4564i
Même si la règle de Bryson permet généralement d’obtenir des résultats satisfaisants, elle ne constitue souvent que le point de départ d'une procédure de design itérative par approximations successives visant à régler la réponse de votre système en boucle fermée en fonction des exigences de design.
aircraftPitchModel.mat contient les matrices de représentation d’état d'un avion où l'entrée correspond à l'angle de déviation de la gouverne de profondeur et la sortie, à l'angle de tangage de l'avion .
Pour une référence indicielle de 0,2 radian, tenez compte des critères de design suivants :
Temps de montée inférieur à 2 secondes
Temps de stabilisation inférieur à 10 secondes
Erreur d’état stationnaire inférieur à 2 %
Chargez les données du modèle dans l’espace de travail.
load('aircraftPitchModel.mat')Définissez la matrice pondérée état/coût Q et la matrice pondérée de contrôle R. En règle générale, vous pouvez utiliser la règle de Bryson pour définir vos matrices pondérées initiales Q et R. Pour cet exemple, considérons le vecteur de sortie C avec un facteur de mise à l’échelle de 2 pour la matrice Q et choisissons R en tant que 1. R est un scalaire étant donné que le système ne présente qu’une entrée.
R = 1
R = 1
Q1 = 2*C'*C
Q1 = 3×3
0 0 0
0 0 0
0 0 2
Calculez la matrice de gain au moyen de lqr.
[K1,S1,P1] = lqr(A,B,Q1,R);
Vérifiez la réponse indicielle en boucle fermée par rapport à la matrice de gain générée K1.
sys1 = ss(A-B*K1,B,C,D); step(sys1)
Étant donné que cette réponse ne satisfait pas aux objectifs de design, augmentez le facteur de mise à l’échelle à 25, calculez la matrice de gain K2 et vérifiez la réponse indicielle en boucle fermée pour la matrice de gain K2.
Q2 = 25*C'*C
Q2 = 3×3
0 0 0
0 0 0
0 0 25
[K2,S2,P2] = lqr(A,B,Q2,R); sys2 = ss(A-B*K2,B,C,D); step(sys2)

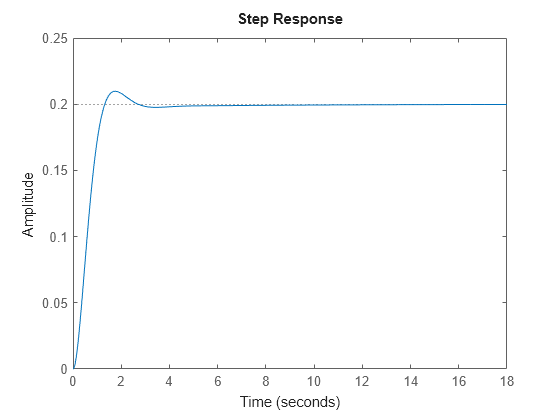
Dans la réponse indicielle en boucle fermée, les temps de montée et de stabilisation, et l’erreur d’état stationnaire satisfont aux objectifs de design.
Arguments d'entrée
Arguments en sortie
Limitations
Les données d’entrée doivent remplir les conditions suivantes :
La paire (A, B) doit pouvoir être stabilisée.
R doit être un nombre défini positif.
doit être un nombre semi-défini positif (de manière équivalente, ).
ne doit pas présenter de mode non détectable sur l’axe imaginaire (ou le cercle unitaire en temps discret).
Conseils
lqrprend en charge les modèles de descripteur avecEnon singulier. La sortieSdelqrcorrespond à la solution de l'équation algébrique de Riccati pour le modèle de représentation d’état explicite équivalent :
Algorithmes
Pour les systèmes en temps continu, lqr calcule le système d’avertissement d’état qui minimise la fonction de coût quadratique
soumis à la dynamique du système .
Outre le gain de retour d’état K, lqr renvoie la solution S de l’équation algébrique de Riccati associée
et les pôles en boucle fermée . La matrice de gain K est dérivée de S au moyen de
Pour les systèmes en temps discret, lqr calcule le système d’avertissement d’état qui minimise
soumis à la dynamique du système .
Dans tous les cas, lorsque vous omettez la matrice des termes croisés N, lqr définit N sur 0.
Historique des versions
Introduit avant R2006a