driving.scenario.roadBoundariesToEgo
Convert road boundaries to ego vehicle coordinates
Syntax
Description
egoRoadBoundaries = driving.scenario.roadBoundariesToEgo(scenarioRoadBoundaries,ego)ego.
egoRoadBoundaries = driving.scenario.roadBoundariesToEgo(scenarioRoadBoundaries,egoPose)egoPose.
Examples
Create a driving scenario containing a figure-8 road specified in the world coordinates of the scenario. Convert the world coordinates of the scenario to the coordinate system of the ego vehicle.
Create an empty driving scenario.
scenario = drivingScenario;
Add a figure-8 road to the scenario. Display the scenario.
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)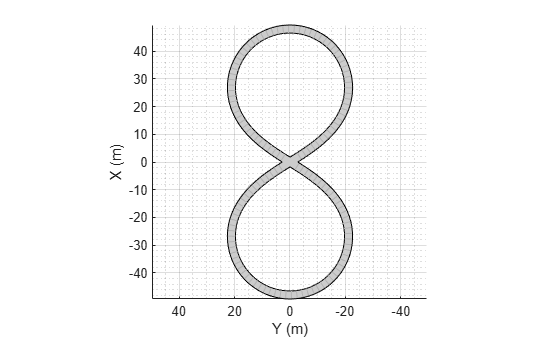
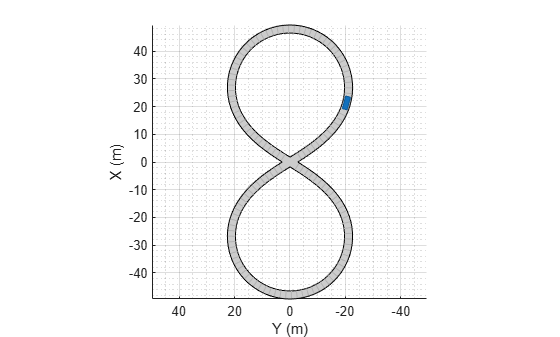
Add an ego vehicle to the scenario. Position the vehicle at world coordinates (20, –20) and orient it at a –15 degree yaw angle.
ego = actor(scenario,'ClassID',1,'Position',[20 -20 0],'Yaw',-15);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
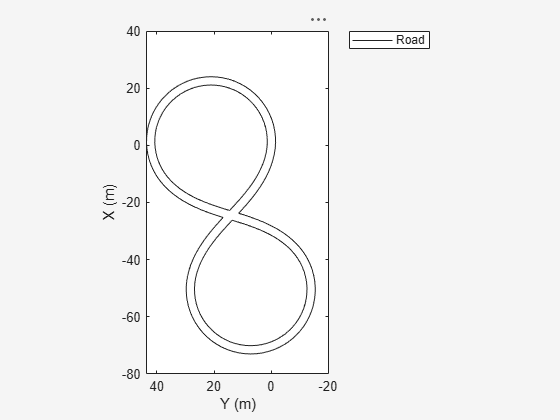
Obtain the road boundaries in ego vehicle coordinates by using the roadBoundaries function. Specify the ego vehicle as the input argument.
rbEgo1 = roadBoundaries(ego);
Display the result on a bird's-eye plot.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)
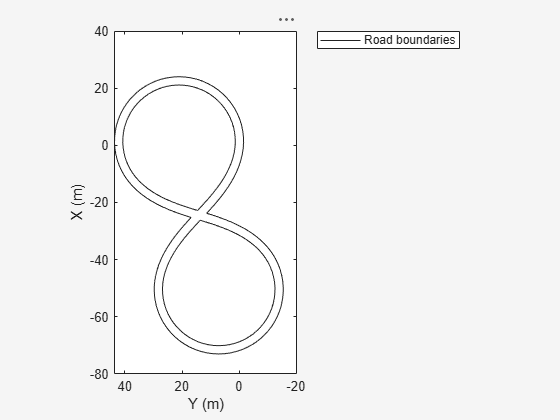
Obtain the road boundaries in world coordinates by using the roadBoundaries function. Specify the scenario as the input argument.
rbScenario = roadBoundaries(scenario);
Obtain the road boundaries in ego vehicle coordinates by using the driving.scenario.roadBoundariesToEgo function.
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
Display the road boundaries on a bird's-eye plot.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})
Input Arguments
Output Arguments
Version History
Introduced in R2017a