fdesign.arbgrpdelay
Arbitrary group delay filter specification object
Syntax
Description
Arbitrary group delay filters are allpass filters that you can use to correct
the phase distortion introduced by other filters. The
fdesign.arbgrpdelay function uses an iterative least
p-th norm optimization procedure to minimize the phase response
error [1].
The fdesign.arbgrpdelay function returns a filter design
specification object containing filter specifications, such as filter order, number of
bands, frequency vector, and group delay response. You then use the design function to design the filter from the filter design
specifications object.
For more control options, see Filter Design Procedure. For a complete workflow, see Design a Filter in Fdesign — Process Overview.
specObj = fdesign.arbgrpdelay
specObj = fdesign.arbgrpdelay(spec,value1,...,valueN)value1,...,valueN. Set the specification options in the
expression spec. After the expression, specify a value for each
option.
specObj = fdesign.arbgrpdelay(___,Fs)
Examples
Create a signal consisting of two discrete-time windowed sinusoids (wave packets) with disjoint time support to illustrate frequency dispersion. One discrete-time sinusoid has a frequency of /2 radians/sample and the other has a frequency of /4 radians/sample. There are nine periods of the sinusoid with the higher frequency that precede five periods of the signal with the lower frequency.
Create the signal.
x = zeros(300,1); x(1:36) = cos(pi/2*(0:35)).*hamming(36)'; x(40:40+39) = cos(pi/4*(0:39)).*hamming(40)';
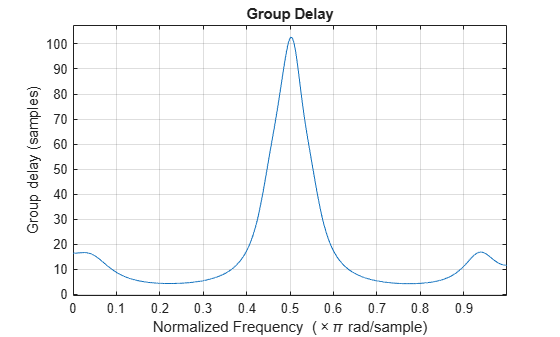
Create an arbitrary group delay filter that delays the wave packet with the higher frequency by approximately 100 samples.
N = 18; f = 0:.1:1; gd = ones(size(f));
Delay /2 radians/sample by 100 samples.
gd(6) = 100;
d = fdesign.arbgrpdelay(N,f,gd);
Hd = design(d,'iirlpnorm',MaxPoleRadius=0.9,SystemObject=true);Visualize the group delay.
grpdelay(Hd);
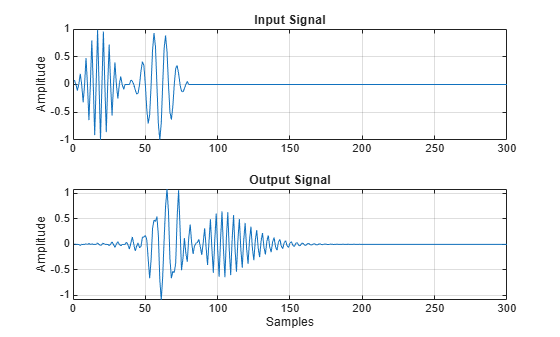
Filter the input signal with the arbitrary group delay filter and plot the frequency dispersion. The high-frequency wave packet, which initially preceded the low-frequency wave packet, now occurs later because of the nonconstant group delay.
y = Hd(x); subplot(211) plot(x); title('Input Signal'); grid on; ylabel('Amplitude'); subplot(212); plot(y); title('Output Signal'); grid on; xlabel('Samples'); ylabel('Amplitude');
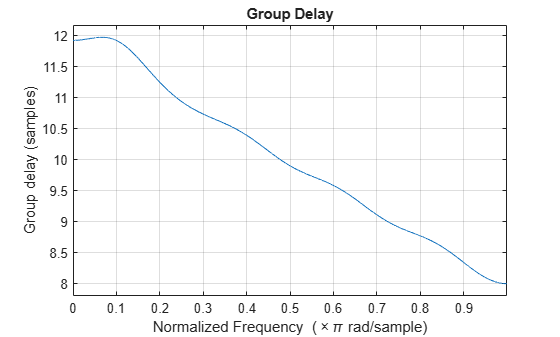
Design an allpass filter with an arbitrary group delay using the fdesign.arbgrpdelay and the design functions. Pass iirlpnorm as the design method.
N = 10; f = [0 0.02 0.04 0.06 0.08 0.1 0.25 0.5 0.75 1]; g = [5 5 5 5 5 5 4 3 2 1]; w = [2 2 2 2 2 2 1 1 1 1]; hgd = fdesign.arbgrpdelay(N,f,g); Hgd = design(hgd,'iirlpnorm',Weights=w,MaxPoleRadius=0.95,... SystemObject=true)
Hgd =
dsp.SOSFilter with properties:
Structure: 'Direct form II'
CoefficientSource: 'Property'
Numerator: [5×3 double]
Denominator: [5×3 double]
HasScaleValues: true
ScaleValues: [0.2292 1 1 1 1 1.3458]
Show all properties
grpdelay(Hgd);
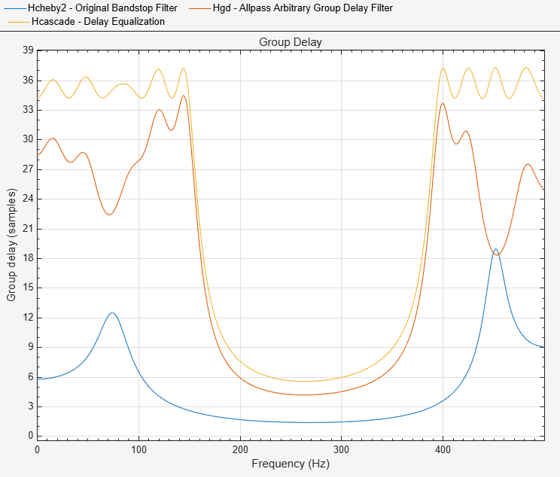
Perform group delay equalization of a bandstop Chebyshev filter operating with a sample rate of 1 kHz.
Fs = 1e3; Hcheby2 = design(fdesign.bandstop('N,Fst1,Fst2,Ast',10,150,400,60,Fs),'cheby2',... SystemObject=true); f1 = 0.0:0.5:150; % Hz g1 = grpdelay(Hcheby2,f1,Fs).'/Fs; % seconds f2 = 400:0.5:500; % Hz g2 = grpdelay(Hcheby2,f2,Fs).'/Fs; % seconds maxg = max([g1 g2]);
Design an arbitrary group delay allpass filter to equalize the group delay of the bandstop filter. Use an 18 order multiband design and specify two bands.
hgd = fdesign.arbgrpdelay('N,B,F,Gd',18,2,f1,maxg-g1,f2,maxg-g2,Fs); Hgd = design(hgd,'iirlpnorm',MaxPoleRadius=0.95,SystemObject=true); Hcascade = cascade(Hcheby2,Hgd); hft = filterAnalyzer(Hcheby2,Hgd,Hcascade,Analysis='groupdelay',SampleRates=Fs); setLegendStrings(hft,["Original Bandstop Filter","Allpass Arbitrary Group Delay Filter",... "Delay Equalization"]);
Input Arguments
Output Arguments
More About
Tips
If your arbitrary group delay design produces the Poorly conditioned Hessian
matrix error, perform one of the following or both.
Set the
MaxPoleRadiusIIR lp norm design option to a number less than 1 when youdesignyour filter.For more information on thedesign(d,'iirlpnorm','MaxPoleRadius',0.95)
MaxPoleRadiusdesign option, see the Design Arbitrary Group Delay and Multiband Delay Equalization examples.Reduce the order of your filter design.
Algorithms
The fdesign.arbgrpdelay function uses a least p-th
norm iterative optimization described in [1].
References
[1] Antoniou, A. Digital Signal Processing: Signals, Systems, and Filters., New York:McGraw-Hill, 2006, pp. 719–771.
Version History
Introduced in R2011b
See Also
fdesign | design | iirgrpdelay | designmethods | designoptions