gmphd
Gaussian mixture (GM) PHD filter
Description
The gmphd object is a filter that implements the
probability hypothesis density (PHD) using a mixture of Gaussian components. The filter
assumes the target states are Gaussian and represents these states using a mixture of Gaussian
components. You can use a gmphd filter to track extended objects or
point targets. In tracking, a point object returns at most one detection per sensor scan, and
an extended object can return multiple detections per sensor scan.
You can directly create a gmphd filter. You can also initialize a
gmphd filter used with trackerPHD by
specifying the FilterInitializationFcn property of trackingSensorConfiguration. You can use the provided initcvgmphd, initctgmphd, initcagmphd, and initctrectgmphd as
initialization functions. Or, you can create your own initialization functions.
Creation
Syntax
Description
phd = gmphdgmphd
filter with default property values.
phd = gmphd(states,stateCovariances)states and
stateCovariances set the States and StateCovariances properties of the filter.
phd = gmphd(states,stateCovariances,Name,Value)
Properties
Object Functions
predict | Predict probability hypothesis density of phd filter |
correctUndetected | Correct phd filter with no detection hypothesis |
correct | Correct phd filter with detections |
likelihood | Log-likelihood of association between detection cells and components in the density |
append | Append two phd filter objects |
merge | Merge components in the density of phd filter |
scale | Scale weights of components in the density |
prune | Prune the filter by removing selected components |
labeledDensity | Keep components with a given label ID |
extractState | Extract target state estimates from the phd filter |
clone | Create duplicate phd filter object |
Examples
Create a filter with two 3-D constant velocity components. The initial state of one component is [0;0;0;0;0;0]. The initial state of the other component is [1;0;1;0;1;0]. Each component is initialized with position covariance equal to 1 and velocity covariance equal to 100.
states = [zeros(6,1) [1;0;1;0;1;0]]; cov1 = diag([1 100 1 100 1 100]); covariances = cat(3,cov1,cov1); phd = gmphd(states, covariances, 'StateTransitionFcn', @constvel,... 'StateTransitionJacobianFcn',@constveljac,... 'MeasurementFcn',@cvmeas,... 'MeasurementJacobianFcn',@cvmeasjac,... 'ProcessNoise', eye(3),... 'HasAdditiveProcessNoise',false);
Predict the filter 0.1 time step ahead.
predict(phd,0.1);
Define three detections using ojbectDetection.
rng(2019);
detections = cell(3,1);
detections{1} = objectDetection(0,[1;1;1] + randn(3,1));
detections{2} = objectDetection(0,[0;0;0] + randn(3,1));
detections{3} = objectDetection(0,[4;5;5] + randn(3,1));
phd.Detections = detections;Calculate the likelihood of each detection. For a point-target filter, the partition of detections is unnecessary, and each detection occupies a cell. Therefore, detectionIndices is an identity matrix. The resulting likelihood of detection 1 and 2 is higher than that of detection 3 because they are closer to the components.
detectionIndices = logical(eye(3)); logLikelihood = likelihood(phd,detectionIndices)
logLikelihood = 2×3
-5.2485 -4.7774 -22.8899
-4.5171 -5.0008 -17.3973
Correct the filter with the scaled likelihood.
lhood = exp(logLikelihood); lhood = lhood./sum(lhood,2); correct(phd,detectionIndices,lhood);
Merge the components with a merging threshold equal to 1.
merge(phd,1);
Extract state estimates with an extract threshold equal to 0.5.
minWeight = 0.5; targetStates = extractState(phd,minWeight); [ts1,ts2]= targetStates.State;
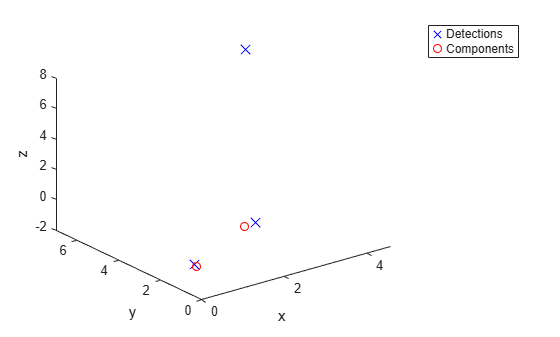
Visualize the results.
% Extract the measurements. d = [detections{:}]; measurements = [d.Measurement]; % Plot the measurements and estimates. figure() plot3(measurements(1,:),measurements(2,:),measurements(3,:),'x','MarkerSize',10,'MarkerEdgeColor','b'); hold on; plot3(ts1(1),ts1(3),ts1(5),'ro'); hold on; plot3(ts2(1),ts2(3),ts2(5),'ro'); xlabel('x') ylabel('y') zlabel('z') hold on; legend('Detections','Components')
References
[1] Vo, B. -T, and W. K. Ma. "The Gaussian mixture Probability Hypothesis Density Filter." IEEE Transactions on Signal Processing, Vol, 54, No, 11, pp. 4091–4104, 2006.
[2] Granstrom, Karl, Christian Lundquist, and Omut Orguner. "Extended target tracking using a Gaussian-mixture PHD filter." IEEE Transactions on Aerospace and Electronic Systems 48, no. 4 (2012): 3268-3286.
[3] Panta, Kusha, et al. “Data Association and Track Management for the Gaussian Mixture Probability Hypothesis Density Filter.” IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 3, July 2009, pp. 1003–16.
Extended Capabilities
Version History
Introduced in R2019b
See Also
trackerPHD | trackingSensorConfiguration | partitionDetections | ggiwphd | initctrectgmphd | initctgmphd | initcvgmphd | initcagmphd