bwlookup
Nonlinear filtering using lookup tables
Syntax
Description
A = bwlookup(BW,lut)BW. The neighborhood processing determines an integer index value
used to access values in lookup table lut. The fetched
lut value becomes the pixel value in output image
A at the targeted position.
Examples
Construct a lookup table lut such that the filtering operation places a 1 at the targeted pixel location in the input image only when all four pixels in the 2-by-2 neighborhood of BW are set to 1.
lutfun = @(x)(sum(x(:))==4); lut = makelut(lutfun,2);
Load a binary image.
BW1 = imread("text.png");Perform 2-by-2 neighborhood processing with 16-element vector lut.
BW2 = bwlookup(BW1,lut);
Display the original and eroded image.
h1 = subplot(1,2,1); imshow(BW1); title("Original Image") h2 = subplot(1,2,2); imshow(BW2); title("Eroded Image")
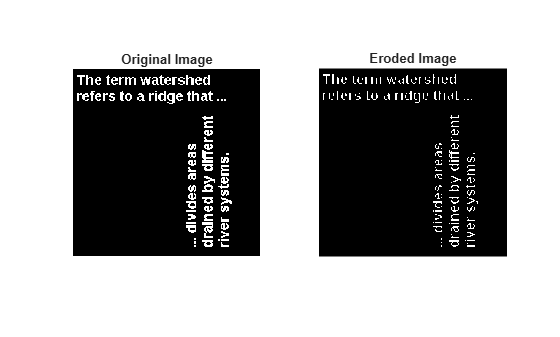
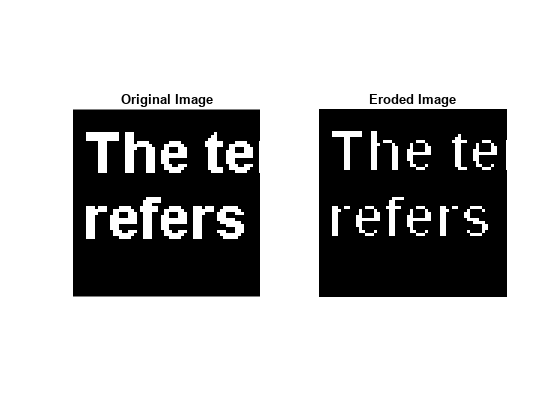
Zoom in to see the effects of erosion on the text.
set(h1,Ylim=[1 64],Xlim=[1 64]); set(h2,Ylim=[1 64],Xlim=[1 64]);
Input Arguments
Output Arguments
Algorithms
The bwlookup function performs these steps to determine the value of
each pixel in the processed image A:
Locate the pixel neighborhood in input image
BWbased on the coordinates of the target pixel inA. The function zero-pads border pixels of imageBWwhen the neighborhood extends past the edge ofBW.Calculate an index,
idx, based on the binary pixel pattern of the neighborhood.Set the target pixel in
Aas the value of the lookup table at the indexidx, in other words, the value oflut(idx).
For an example that demonstrates each step of the algorithm, see Look Up Value of Sample Pixel.
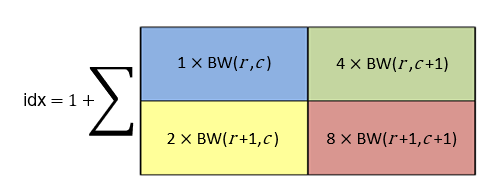
For 2-by-2 neighborhoods, there are four pixels in each neighborhood. Each binary pixel
has two possible states, therefore the total number of permutations is
24 and the length of the lookup table lut
is 16.
To find the value of the target output pixel at (row, column) coordinate
(r,c), bwlookup uses the 2-by-2
pixel neighborhood in the input binary image BW whose top left pixel is
at coordinate (r,c). The index idx
into the lookup table is the weighted sum of the four pixels in the neighborhood, plus
1.
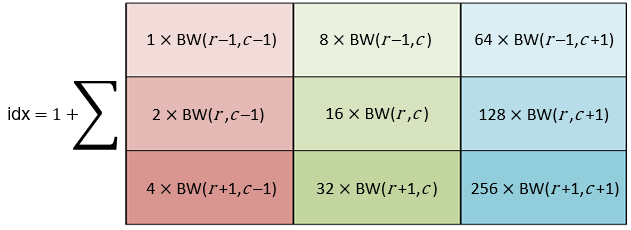
For 3-by-3 neighborhoods, there are nine pixels in each neighborhood. Each binary pixel
has two possible states, therefore the total number of permutations is
29 and the length of the lookup table lut
is 256.
To find the value of the target output pixel at (row, column) coordinate
(r,c), bwlookup uses the 3-by-3
pixel neighborhood in the input binary image BW centered on coordinate
(r,c). The index idx into the
lookup table is the weighted sum of the nine pixels in the neighborhood, plus 1.