bwulterode
Ultimate erosion
Description
Examples
Read a binary image into the workspace and display it.
originalBW = imread('circles.png');
imshow(originalBW)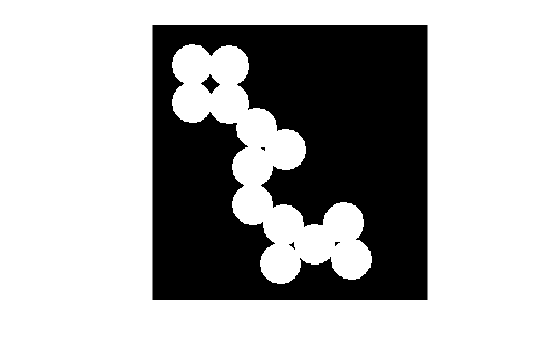
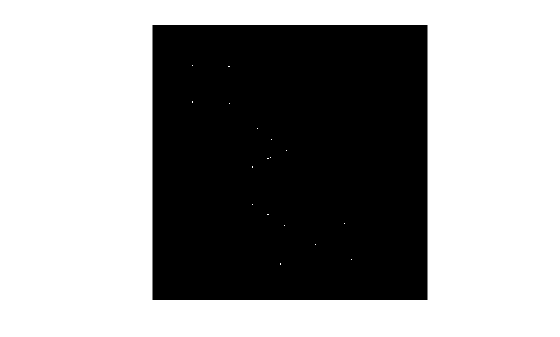
Perform the ultimate erosion of the image and display it.
ultimateErosion = bwulterode(originalBW); figure, imshow(ultimateErosion)
Input Arguments
Binary image, specified as a numeric or logical array of any dimension.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | logical
Distance transform method, specified as one of the values in this table.
Method | Description |
|---|---|
"chessboard" | In 2-D, the chessboard distance between (x1,y1) and (x2,y2) is
max(│x1 – x2│,│y1 – y2│).
|
"cityblock" | In 2-D, the cityblock distance between (x1,y1) and (x2,y2) is
│x1 – x2│ + │y1 – y2│
|
"euclidean" | In 2-D, the Euclidean distance between (x1,y1) and (x2,y2) is
|
"quasi-euclidean" | In 2-D, the quasi-Euclidean distance between (x1,y1) and (x2,y2) is
|
For more information, see Distance Transform of a Binary Image.
Pixel connectivity, specified as one of the values in this table. The default
connectivity is 8 for 2-D images, and 26 for 3-D
images.
Value | Meaning | |
|---|---|---|
Two-Dimensional Connectivities | ||
| Pixels are connected if their edges touch. The neighborhood of a pixel are the adjacent pixels in the horizontal or vertical direction. |
Current pixel is shown in gray. |
| Pixels are connected if their edges or corners touch. The neighborhood of a pixel are the adjacent pixels in the horizontal, vertical, or diagonal direction. |
Current pixel is shown in gray. |
Three-Dimensional Connectivities | ||
| Pixels are connected if their faces touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is shown in gray. |
| Pixels are connected if their faces or edges touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is center of cube. |
| Pixels are connected if their faces, edges, or corners touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is center of cube. |





For higher dimensions, bwulterode uses the default value
conndef(ndims(BW),"maximal")
Data Types: double | logical
Output Arguments
Version History
Introduced before R2006a