rangeSensor
Simulate range-bearing sensor readings
Description
The rangeSensor
System object™ is a range-bearing sensor that is capable of outputting range and angle
measurements based on the given sensor pose and occupancy map. The range-bearing readings are
based on the obstacles in the occupancy map.
To simulate a range-bearing sensor using this object:
Create the
rangeSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
rbsensor = rangeSensorrangeSensor System object, rbsensor. The sensor is
capable of outputting range and angle measurements based on the sensor pose and an
occupancy map.
rbsensor = rangeSensor(Name,Value)
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a range-bearing sensor.
rbsensor = rangeSensor;
Specify the pose of the sensor and the ground-truth map.
truePose = [0 0 pi/4]; trueMap = binaryOccupancyMap(eye(10));
Generate the sensor readings.
[ranges, angles] = rbsensor(truePose, trueMap);
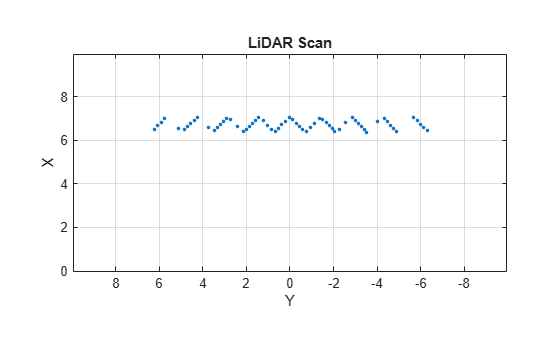
Visualize the results using lidarScan.
scan = lidarScan(ranges, angles); figure plot(scan)
Extended Capabilities
Version History
Introduced in R2020b
See Also
occupancyMap (Navigation Toolbox) | binaryOccupancyMap (Navigation Toolbox) | lidarScan