binaryOccupancyMap
Créer une grille d'occupation avec des valeurs binaires
Description
Le binaryOccupancyMap crée un objet de carte d'occupation 2D, que vous pouvez utiliser pour représenter et visualiser un espace de travail de robot, y compris les obstacles. L'intégration des données de capteurs et des estimations de position crée une représentation spatiale des emplacements approximatifs des obstacles.
Les grilles d'occupation sont utilisées dans les algorithmes robotiques tels que la planification de chemins. Ils sont également utilisés dans les applications de cartographie, par exemple pour trouver des chemins sans collision, éviter les collisions et calculer la localisation. Vous pouvez modifier votre grille d'occupation pour l'adapter à votre application spécifique.
Chaque cellule de la grille d'occupation a une valeur représentant l'état d'occupation de cette cellule. Un emplacement occupé est représenté par true (1) et un emplacement libre est représenté par false (0).
L'objet garde la trace de trois cadres de référence : monde, local et grille. L'origine du cadre mondial est définie par GridLocationInWorld, qui définit le coin inférieur gauche de la carte par rapport au cadre mondial. La propriété LocalOriginInWorld spécifie l'emplacement de l'origine du frame local par rapport au frame mondial. Le premier emplacement de la grille avec l'index (1,1) commence dans le coin supérieur gauche de la grille.
Remarque
Cet objet était auparavant nommé robotics.BinaryOccupancyGrid.
Création
Syntaxe
Description
map = binaryOccupancyMap crée une grille d'occupation binaire 2D d'une largeur et d'une hauteur de 10 m. La résolution de grille par défaut est d'une cellule par mètre.
map = binaryOccupancyMap(rows,cols, crée une grille d'occupation binaire 2D de taille (resolution,"grid")rows, cols).
map = binaryOccupancyMap( crée une grille à partir des valeurs de la matrice p)p. La taille de la grille correspond à la taille de la matrice, chaque valeur de cellule étant interprétée à partir de son emplacement dans la matrice. p contient tout type numérique ou logique avec des zéros (0) et des uns (1).
map = binaryOccupancyMap( crée une carte à partir d'une matrice avec la propriété p,resolution)Resolution spécifiée en cellules par mètre.
map = binaryOccupancyMap( crée un objet en utilisant les valeurs d'un autre objet sourcemap)binaryOccupancyMap .
map = binaryOccupancyMap( crée un objet en utilisant les valeurs d'un autre objet sourcemap,resolution)binaryOccupancyMap , mais rééchantillonne la matrice pour avoir la résolution spécifiée.
Arguments en entrée
Propriétés
Fonctions d'objet
copy | Créer une copie de la carte d'occupation binaire |
checkOccupancy | Vérifiez si les emplacements sont libres ou occupés |
getOccupancy | Obtenez la valeur d'occupation des emplacements |
grid2local | Convertir les indices de grille en coordonnées locales |
grid2world | Convertir les indices de grille en coordonnées mondiales |
inflate | Inflate each occupied location |
insertRay | Insérer un rayon à partir d'une observation par balayage laser |
local2grid | Convert local coordinates to grid indices |
local2world | Convert local coordinates to world coordinates |
move | Déplacer la carte dans le cadre du monde |
occupancyMatrix | Convertir la grille d'occupation en matrice |
raycast | Calculer les indices de cellules le long d'un rayon |
rayIntersection | Trouver les points d'intersection des rayons et des cellules de carte occupées |
setOccupancy | Définir la valeur d'occupation des emplacements |
show | Afficher la carte d'occupation binaire |
syncWith | Synchroniser la carte avec la carte superposée |
world2grid | Convertir les coordonnées mondiales en indices de grille |
world2local | Convert world coordinates to local coordinates |
Exemples
Créez une carte vide de 10 mx 10 m.
map = binaryOccupancyMap(10,10,10);
Définir l'occupation des emplacements du monde et afficher la carte.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; setOccupancy(map, [x y], ones(5,1)) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_01_fr.png)
Gonflez les emplacements occupés d’un rayon donné.
inflate(map, 0.5) figure show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_02_fr.png)
Obtenez les emplacements de la grille à partir des emplacements du monde.
ij = world2grid(map, [x y]);
Définissez les emplacements de la grille sur des emplacements libres.
setOccupancy(map, ij, zeros(5,1), 'grid')
figure
show(map)![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](createandmodifybinaryoccupancygridexample_03_fr.png)
Cet exemple montre comment convertir une image en grille d'occupation binaire à utiliser avec la cartographie et la planification de chemin.
Importer une image.
image = imread('imageMap.png');Convertissez en niveaux de gris, puis en image en noir et blanc en fonction de la valeur de seuil donnée.
grayimage = rgb2gray(image); bwimage = grayimage < 0.5;
Utilisez une image en noir et blanc comme entrée matricielle pour la grille d'occupation binaire.
grid = binaryOccupancyMap(bwimage); show(grid)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](imagetobinaryoccupancygridexampleexample_01_fr.png)
Cet exemple montre comment convertir un fichier .pgm en un objet binaryOccupancyMap à utiliser dans MATLAB.
Importez l'image en utilisant imread. L'image est assez grande et doit être recadrée selon la zone concernée.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)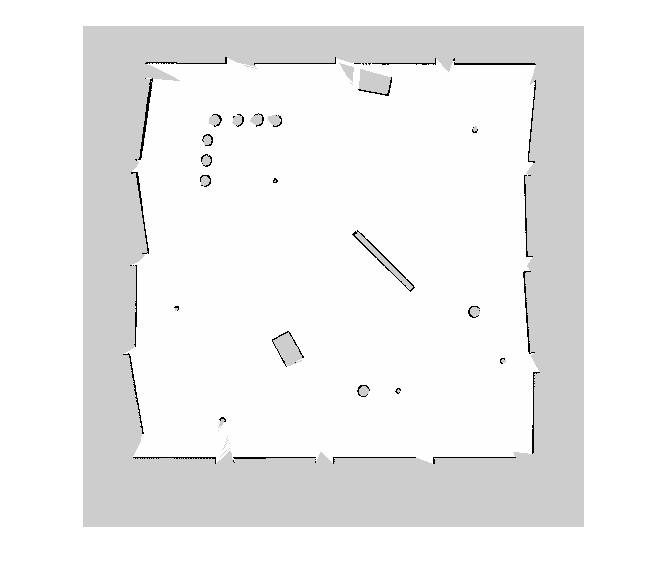
Les zones inconnues (grises) doivent être supprimées et traitées comme de l'espace libre. Créez une matrice logique basée sur un seuil. Selon votre image, cette valeur peut être différente. L'espace occupé doit être défini sur 1 (blanc dans l'image).
imageBW = imageCropped < 100; imshow(imageBW)
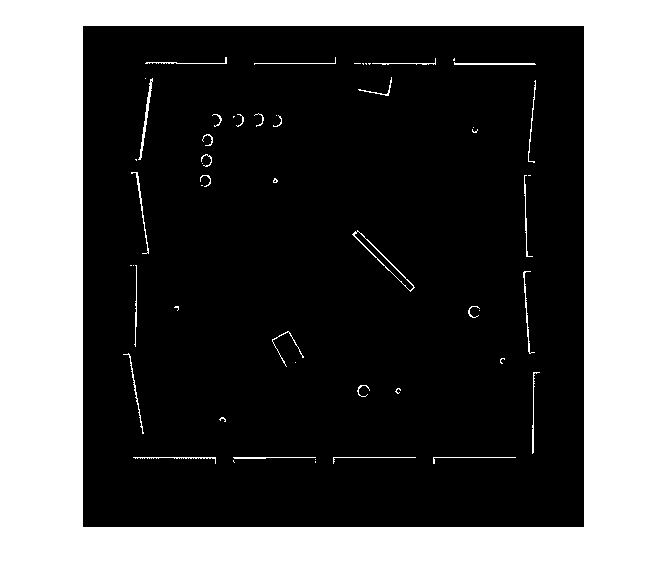
Créez un objet binaryOccupancyMap en utilisant une image de carte ajustée.
map = binaryOccupancyMap(imageBW); show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](convertpgmimagetomapexample_03_fr.png)