mpcmove
Compute optimal control action and update controller states
Syntax
Description
Use this command to simulate an MPC controller in closed-loop with a plant model.
Call mpcmove repeatedly in a for-loop to calculate the
manipulated variable and update the controller states at each time step.
Classical MPC
mv = mpcmove(mpcobj,xc,ym,r,v)mv and updates the states
xc of the classical MPC controller
mpcobj.
The manipulated variable mv at the current time is calculated given:
Classical MPC controller object,
mpcobjState object pointing to the current estimated extended state,
xcMeasured plant outputs,
ymOutput references,
rMeasured disturbance input,
v
If ym, r, or v is
specified as [], or if it is missing as a last input argument,
mpcmove uses the appropriate
mpcobj.Model.Nominal value instead.
When you use default state estimation, mpcmove also updates the
controller state referenced by the handle object xc. Therefore, when
you use default state estimation, xc always points to the updated
controller state. When you use custom state estimation, update xc
prior to each mpcmove call.
[___] = mpcmove(___,
overrides default constraints and weights in options)mpcobj with the values
specified in options, an mpcmoveopt object. Use this syntax with any of the input or output arguments
in the previous syntaxes. Use options to provide run-time adjustment
of constraints and weights during the closed-loop simulation.
Data-Driven MPC
mv = mpcmove(ddobj,xc,uk1,yk1,r)mv and updates the states
xc of the data-driven MPC controller
ddobj.
The manipulated variable mv at the current time is calculated given:
Data-driven MPC controller object,
ddobjState object pointing to the past trajectory,
xcPlant input measured at the previous control interval,
uk1Plant output measured at the previous control interval,
yk1Output reference data
rfor the control intervals from the current time k to the time k +ddobj.FutureSteps-1.rmust be a matrix withddobj.FutureStepsrows and as many columns as the number of outputs. It defaults to zero if omitted. Use this syntax with any of the input or output arguments in the previous syntaxes.
[___] = mpcmove(___,MVTarget=
additionally specifies the input reference data dataUref)dataUref for the
control intervals from the current time k to the time
k + ddobj.FutureSteps - 1. It
must be a matrix with ddobj.FutureSteps rows and as many columns as
the number of inputs. It defaults to zero if omitted.
Examples
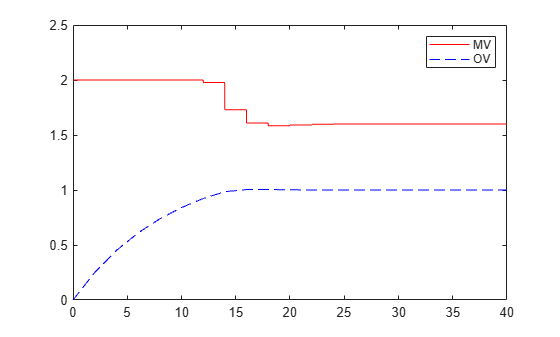
Perform closed-loop simulation of a plant with one MV and one measured OV.
Define a plant model and create a model predictive controller with MV constraints.
ts = 2; Plant = ss(0.8,0.5,0.25,0,ts); mpcobj = mpc(Plant);
-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
mpcobj.MV(1).Min = -2; mpcobj.MV(1).Max = 2;
Obtain a handle object pointing to the controller state.
xc = mpcstate(mpcobj)
-->Integrator added as output disturbance model for measured output #1.
-->"Model.Noise" is empty. Assuming white noise on each measured output.
MPCSTATE object with fields
Plant: 0
Disturbance: 0
Noise: [1×0 double]
LastMove: 0
Covariance: [2×2 double]
The controller has one state for the internal plant model, one for the disturbance model, and one to hold the last value of the manipulated variable. All these three states are initialized to zero.
Set the reference signal. There is no measured disturbance.
r = 1;
Simulate the closed-loop response by calling mpcmove iteratively. In the simulation, assume that the simulated plant is identical to the predictive model. Therefore the plant state x in this case is identical to xc.Plant and the plant output is y = C*x + D*u = 0.25*x = 0.25*xc.Plant. Here, mpcmove updates the controller state referenced by xc (therefore including xc.Plant), and returns the manipulated variable in u(i), which is used just for plotting.
t = 0:ts:40; N = length(t); y = zeros(N,1); u = zeros(N,1); for i = 1:N y(i) = 0.25*xc.Plant; u(i) = mpcmove(mpcobj,xc,y(i),r); end
Analyze the result.
[ts,us] = stairs(t,u); plot(ts,us,'r-',t,y,'b--') legend('MV','OV')
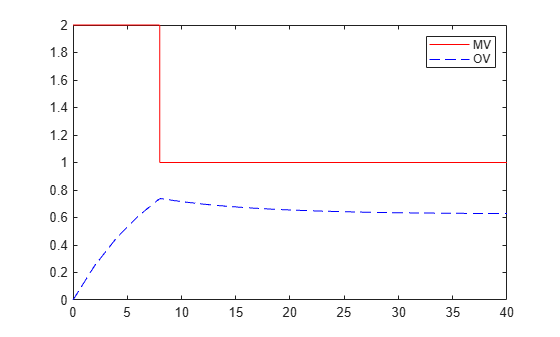
Modify the MV upper bound as the simulation proceeds using an mpcmoveopt object. Because the options argument overrides selected mpcobj properties, specify MV constraints again.
MPCopt = mpcmoveopt; MPCopt.MVMin = -2; MPCopt.MVMax = 2;
Simulate the closed-loop response and introduce the real-time upper limit change at eight seconds (the fifth iteration step).
xc = mpcstate(mpcobj); y = zeros(N,1); u = zeros(N,1); for i = 1:N y(i) = 0.25*xc.Plant; if i == 5 MPCopt.MVMax = 1; end u(i) = mpcmove(mpcobj,xc,y(i),r,[],MPCopt); end
Analyze the results.
[ts,us] = stairs(t,u); plot(ts,us,'r-',t,y,'b--') legend('MV','OV')
Define a plant model.
ts = 2; Plant = ss(0.8,0.5,0.25,0,ts);
Create a model predictive controller with constraints on both the manipulated variable and the rate of change of the manipulated variable. The prediction horizon is 10 intervals, and the control horizon is blocked.
mpcobj = mpc(Plant,ts,10,[2 3 5]);
-->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
mpcobj.MV(1).Min = -2; mpcobj.MV(1).Max = 2; mpcobj.MV(1).RateMin = -1; mpcobj.MV(1).RateMax = 1;
Initialize (and return a handle to) the controller internal state for simulation.
xc = mpcstate(mpcobj);
-->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
xc.Plant = 2.8; xc.LastMove = 0.85;
Compute the optimal control move at the current time.
y = 0.25*xc.Plant; r = 1; [u,Info] = mpcmove(mpcobj,xc,y,r);
Analyze the predicted optimal sequences.
[ts,us] = stairs(Info.Topt,Info.Uopt); plot(ts,us,"r-",Info.Topt,Info.Yopt,"b--") legend("MV","OV")
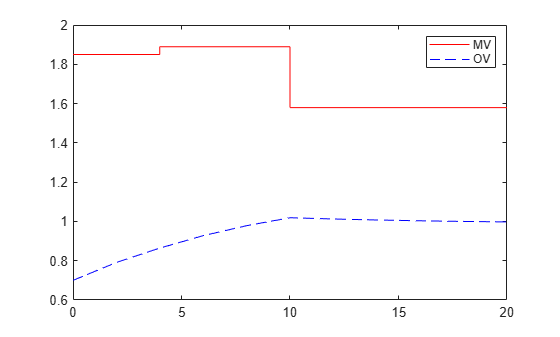
plot ignores Info.Uopt(end) as it is NaN.
Examine the optimal cost.
Info.Cost
ans = 0.0793
Input Arguments
Output Arguments
Tips
mpcmoveupdatesxc, even though it is an input argument.If
ym,r, orvis specified as[], or if it is missing as a last input argument,mpcmoveuses the appropriatempcobj.Model.Nominalvalue instead.To view the predicted optimal behavior for the entire prediction horizon, plot the appropriate sequences provided in
Info.To determine the optimization status, check
Info.IterationsandInfo.QPCode.
Alternatives
Use
simfor plant mismatch and noise simulation when not using run-time constraints or weight changes.Use the MPC Designer app to interactively design and simulate model predictive controllers.
Use the MPC Controller block in Simulink and for code generation.
Use
mpcmoveCodeGenerationto simulate an MPC controller prior to code generation.
Version History
Introduced before R2006a
See Also
Functions
review|cloffset|buildMEX|mpcmoveCodeGeneration|mpcmoveAdaptive|mpcmoveMultiple|mpcmoveExplicit|sim
Objects
mpc|mpcstate|mpcmoveopt|mpcsimopt|explicitMPC|DataDrivenMPC