accelcal
Syntaxe
Description
[ renvoie la matrice A,b] = accelcal(D)A et le vecteur b utilisés pour corriger les mesures non calibrées de l'accéléromètre en fonction des données d'étalonnage D.
Après avoir obtenu A et b, obtenez les données calibrées C à partir des données non calibrées U en utilisant C = U*A + b, où U est une matrice M-by-3 et chaque ligne de U est une mesure d'accéléromètre non calibrée.
Exemples
Arguments d'entrée
Arguments de sortie
En savoir plus
Pour obtenir les données de mesure pour l'étalonnage de l'accéléromètre, alignez l'orientation du cadre de mesure de l'accéléromètre (X-Y-Z) avec l'une des six orientations indiquées dans ce diagramme. Par exemple, pour obtenir une mesure x-up, alignez la direction X positive du repère de mesure de l'accélérateur dans la direction opposée à la force de gravité, comme indiqué sur la première figure.
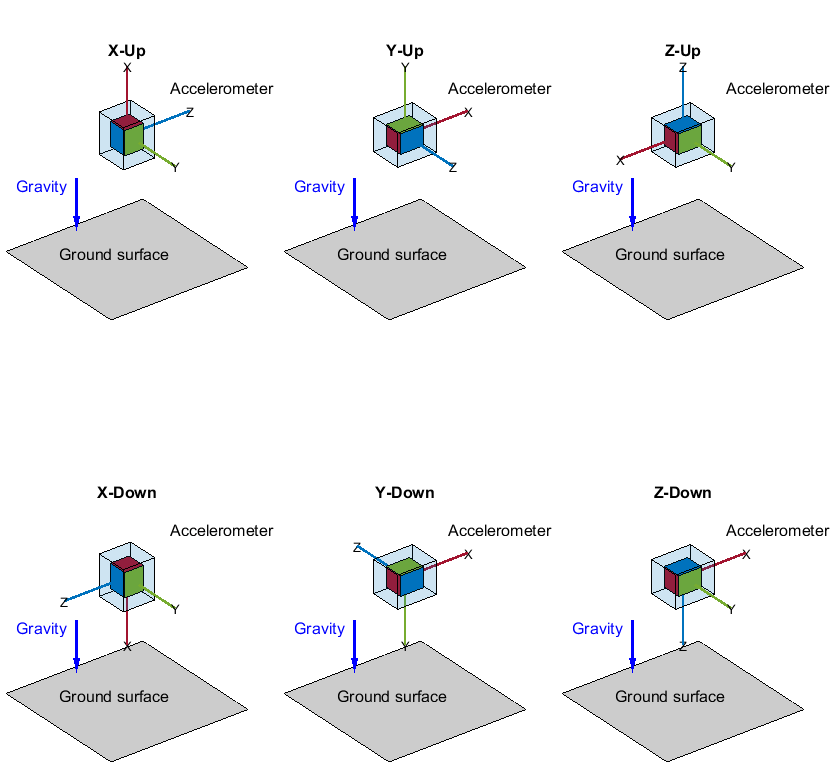
Si l'accéléromètre ne présente aucune erreur d'étalonnage et que son cadre de mesure est parfaitement aligné comme indiqué sur la figure, vous pouvez obtenir des mesures idéales dans ce tableau.
| Orientation | aX | aY | aZ |
|---|---|---|---|
| X-Up | -g | 0 | 0 |
| X-Down | +g | 0 | 0 |
| Y-Up | 0 | -g | 0 |
| Y-Down | 0 | +g | 0 |
| Z-Up | 0 | 0 | -g |
| Z-Down | 0 | 0 | +g |
Dans le tableau, aX, aY et aZ représentent respectivement les composantes d'accélération selon les axes X, Y et Z. g correspond à la constante gravitationnelle terrestre locale.
Références
[1] AN4508 Application Note: Parameters and Calibration of a Low-G 3-Axis Accelerometer.
Historique des versions
Introduit dans R2023b